Przewodnik po mikrokontrolerze: jak to działa, typy, programowanie, architektura i aplikacje
Mikrokontroler to mały komputer wbudowany w pojedynczy układ scalony, który kontroluje działanie urządzeń elektronicznych.W tym przewodniku dowiesz się, co robią mikrokontrolery, jak są zbudowane oraz jak przetwarzają dane wejściowe i wyjściowe w celu uruchomienia różnych systemów.Dowiesz się także o różnych typach mikrokontrolerów, ich strukturach pamięci i sposobach programowania ich do swoich zastosowań.Katalog

Rysunek 1. Mikrokontroler na płytce drukowanej
Co to jest mikrokontroler?
Mikrokontroler (MCU) to kompaktowy, samodzielny komputer umieszczony w jednym chipie.Integruje rdzeń procesora, pamięć (Flash, RAM) i różne urządzenia peryferyjne, takie jak timery, przetworniki ADC i interfejsy komunikacyjne.Integracja ta umożliwia efektywne sterowanie systemami elektronicznymi przy jednoczesnym zużyciu bardzo małej ilości energii.Mikrokontrolery są „mózgami” większości systemów wbudowanych.Ich konstrukcja koncentruje się na wykonywaniu określonych, powtarzalnych zadań sterujących, a nie na uruchamianiu złożonych aplikacji, takich jak komputer stacjonarny.
Struktura mikrokontrolera
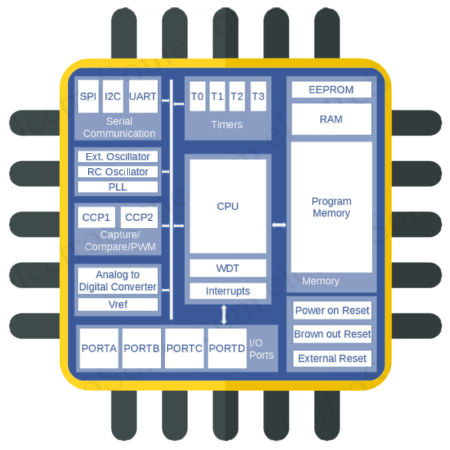
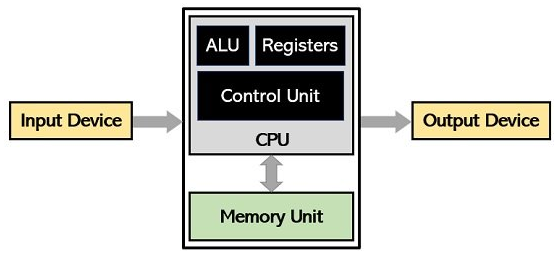
Rysunek 2. Wewnętrzna struktura mikrokontrolera
Struktura mikrokontrolera łączy możliwości obliczeniowe, pamięć masową i interfejsy w ramach jednego układu scalonego.Jego główne sekcje obejmują:
• CPU (Central Processing Unit): Wykonuje instrukcje i kieruje danymi pomiędzy komponentami wewnętrznymi.
• Pamięć Flash: Przechowuje na stałe kod programu.
• RAM: Zapewnia tymczasowe przechowywanie danych podczas pracy.
• EEPROM: Zapisuje dane konfiguracyjne nawet przy wyłączonym zasilaniu.
• Porty I/O: łączą MCU z komponentami zewnętrznymi, takimi jak diody LED, czujniki i przełączniki.
• Timery i liczniki: obsługa funkcji opartych na czasie i zliczanie zdarzeń.
• Moduły ADC/DAC: Konwertuj sygnały analogowe z czujników na postać cyfrową i odwrotnie.
• Interfejsy komunikacyjne (UART, SPI, I²C): Umożliwiają wymianę danych z innymi urządzeniami i modułami.
Jak działają mikrokontrolery?
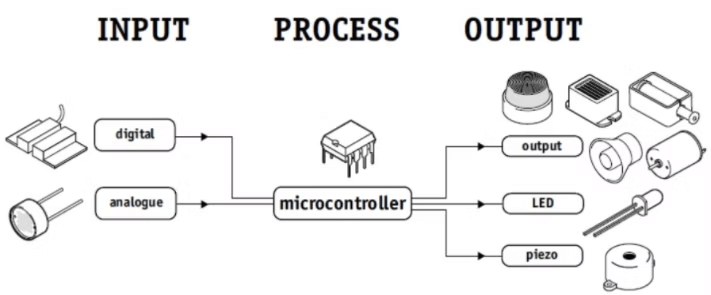
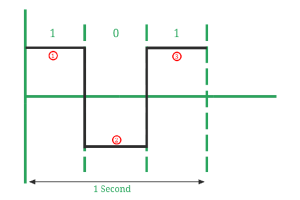
Rysunek 3. Cykl wejście – proces – wyjście mikrokontrolera
Mikrokontroler służy jako główna jednostka sterująca systemu wbudowanego.Uruchamia zapisany program ze swojej pamięci wewnętrznej i wykonuje powtarzającą się sekwencję operacji wejścia, przetwarzania i wyjścia.Po włączeniu najpierw inicjuje swoje rejestry, porty i urządzenia peryferyjne, a następnie zaczyna wykonywać instrukcje jedna po drugiej.
W stopniu wejściowym mikrokontroler zbiera dane z otoczenia poprzez swoje piny wejściowe.Sygnały te mogą pochodzić z czujników cyfrowych, takich jak przyciski, lub urządzeń analogowych, takich jak czujniki temperatury i potencjometry.Każde wejście jest konwertowane do czytelnej postaci, którą mikrokontroler może zinterpretować.
Na etapie przetwarzania procesor ocenia te dane wejściowe zgodnie z zaprogramowaną logiką.Operacje arytmetyczne i logiczne służą do podejmowania decyzji, porównywania wartości lub wywoływania określonych reakcji.Na przykład MCU może określić, czy zmierzone napięcie przekracza próg lub czy naciśnięcie przycisku powinno aktywować określone urządzenie wyjściowe.
Wreszcie, na etapie wyjściowym, mikrokontroler oddziałuje na przetwarzane dane, sterując komponentami zewnętrznymi.Może włączać diody LED, uruchamiać silniki, emitować sygnały dźwiękowe lub wyświetlać informacje na wyświetlaczu LCD.To działanie wyjściowe kończy cykl i przygotowuje mikrokontroler do powtórzenia sekwencji, umożliwiając ciągłe monitorowanie i kontrolę systemu.
Ta pętla wejście – proces – wyjście stanowi rdzeń każdego systemu opartego na mikrokontrolerze.Umożliwia zautomatyzowane podejmowanie decyzji, stabilność i precyzję w niezliczonych zastosowaniach.
Rodzaje bitów mikrokontrolera
Mikrokontrolery są klasyfikowane na podstawie szerokości ich magistrali danych, zwykle 8-bitowe, 16-bitowe lub 32-bitowe.Wybór odpowiedniego rozmiaru bitów mikrokontrolera zależy od złożoności i wymagań wydajnościowych systemu wbudowanego.
Mikrokontrolery 8-bitowe
Rysunek 4. Przykład mikrokontrolerów 8-bitowych
8-bitowy mikrokontroler przetwarza jeden bajt danych na raz, dzięki czemu idealnie nadaje się do podstawowych zadań związanych ze sterowaniem i automatyzacją.Urządzenia te są tanie, energooszczędne i łatwe w programowaniu.Są szeroko stosowane w produktach takich jak zegary cyfrowe, regulatory temperatury i prosta robotyka.Typowe przykłady obejmują rodziny Intel 8031/8051, PIC10/12/16, Motorola MC68HC11 i Atmel AVR.
Mikrokontrolery 16-bitowe

Rysunek 5. Przykład 16-bitowego mikrokontrolera
16-bitowy mikrokontroler może obsłużyć większe wartości danych do 65 535, co pozwala na wykonywanie bardziej precyzyjnych obliczeń i szybszych operacji kontrolnych.Kontrolery te są często stosowane w urządzeniach wymagających umiarkowanej mocy obliczeniowej, takich jak instrumenty medyczne, systemy pomiarowe i sterowniki małych silników.Oferują równowagę pomiędzy kosztem, szybkością i złożonością, dzięki czemu nadają się do zastosowań wbudowanych średniej klasy.Dobrze znane przykłady obejmują serie TI MSP430, Intel 8096, Motorola MC68HC12 i 8051XA.
Mikrokontrolery 32-bitowe

Rysunek 6. Przykład 32-bitowego mikrokontrolera
Mikrokontrolery 32-bitowe to najbardziej zaawansowany typ, zbudowany w oparciu o architektury o wysokiej wydajności, takie jak rdzenie ARM Cortex.Wykonują instrukcje 32-bitowe i obsługują złożoną wielozadaniowość, komunikację i przetwarzanie danych.Te mikrokontrolery są stosowane w urządzeniach IoT, automatyce przemysłowej, robotyce i systemach elektronicznych ze względu na ich dużą prędkość i dużą pojemność pamięci.Popularne przykłady obejmują serie STM32, ESP32, NXP Kinetis, PIC32 i Intel/Atmel 251.
Architektura pamięci mikrokontrolera
Architektura pamięci mikrokontrolera określa, w jaki sposób przechowuje on dane i instrukcje oraz uzyskuje do nich dostęp.Stosowane są dwa główne projekty: architektura Harvarda i Von Neumanna.
Mikrokontroler architektury Harvarda
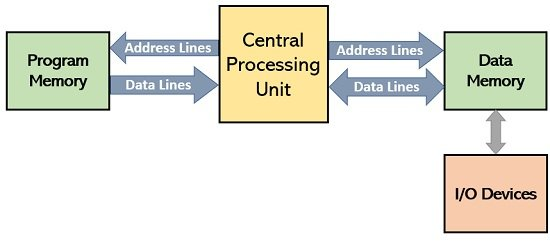
Rysunek 7. Mikrokontroler o architekturze pamięci Harvard
W tej konstrukcji zastosowano oddzielne przestrzenie pamięci do przechowywania programów i danych.Pamięć programu przechowuje instrukcje, podczas gdy pamięć danych przechowuje zmienne.Ponieważ dostęp do obu rozwiązań jest możliwy jednocześnie, architektura Harvardu zapewnia większą wydajność i lepszą efektywność.Jest preferowany w sterowaniu czasem, cyfrowym przetwarzaniu sygnałów (DSP) i aplikacjach wymagających szybkiego wykonywania instrukcji.
Mikrokontroler architektury pamięci Von Neumanna
Rysunek 8. Mikrokontroler o architekturze pamięci Von Neumanna
W tej architekturze zarówno instrukcje programu, jak i dane współdzielą tę samą pamięć i system magistrali.Chociaż jest to prostsze i bardziej opłacalne, może powodować opóźnienia, ponieważ nie można uzyskać jednoczesnego dostępu do programu i danych.Systemy Von Neumanna są powszechnie stosowane w mikrokontrolerach ogólnego przeznaczenia, edukacyjnych i tanich.
Programowanie mikrokontrolera
Programowanie określa, w jaki sposób mikrokontroler zachowuje się i reaguje na otoczenie.Piszesz oprogramowanie układowe, czyli zestaw instrukcji sterujących sposobem, w jaki MCU odczytuje dane wejściowe, przetwarza dane i wysyła dane wyjściowe.
Wspólne narzędzia programistyczne
• Arduino IDE: dla płytek podstawowych i płyt typu open source, takich jak Arduino.
• Keil µVision: używany w urządzeniach opartych na architekturze ARM.
• MPLAB X IDE: dla rodzin PIC i dsPIC firmy Microchip.
• STM32CubeIDE: dla kontrolerów STM32 firmy STMicroelectronics.
Typowy przepływ pracy
1. Napisz kod źródłowy
Otwórz swoje IDE i utwórz nowy projekt dla docelowego mikrokontrolera.Wybierz prawidłowe urządzenie, ustawienia zegara i kod startowy lub HAL/SDK.Napisz oprogramowanie sprzętowe w C, C++ lub MicroPython z przejrzystymi funkcjami do odczytu, przetwarzania i sterowania danymi wejściowymi.Dodaj komentarze i podstawową obsługę błędów, aby zapewnić łatwość konserwacji osadzonego kodu.
2. Skompiluj i zbuduj
Wybierz odpowiedni zestaw narzędzi i poziom optymalizacji pod względem rozmiaru lub szybkości.Skompiluj projekt, aby wygenerować plik HEX, BIN lub ELF do odczytu maszynowego.Napraw błędy kompilatora i ostrzeżenia adresowe, aby zapobiec błędom środowiska wykonawczego na MCU.Potwierdź ścieżkę pliku wyjściowego i zanotuj mapę pamięci pod kątem wykorzystania pamięci flash i RAM.
3. Prześlij (flashuj) program
Podłącz płytkę przez USB, ISP, SWD lub dedykowany interfejs programisty.Wybierz właściwy port COM lub sondę, ustaw napięcie i opcje resetowania, a następnie rozpocznij miganie.Poczekaj na zakończenie kroku weryfikacji, aby narzędzie mogło sprawdzić zapisane oprogramowanie sprzętowe.Wyłącz i zresetuj płytę, aby uruchomić nową aplikację.
4. Przetestuj i debuguj
Użyj monitora szeregowego, aby wydrukować kluczowe zmienne i stany w celu uzyskania szybkiej informacji zwrotnej.Obserwuj diody LED pod kątem prostych sygnałów pass/fail i wskazówek dotyczących synchronizacji.Aby uzyskać precyzyjne pomiary, należy sondować sygnały za pomocą oscyloskopu lub analizatora stanów logicznych i sprawdzać taktowanie wejść/wyjść, obciążenie PWM i magistrale komunikacyjne.Wykonuj iteracje oprogramowania sprzętowego, przebudowuj je i wgrywaj ponownie, aż mikrokontroler będzie działał dokładnie tak, jak wymaga tego aplikacja.
Proces ten zapewnia, że mikrokontroler działa dokładnie tak, jak zaprojektowano dla konkretnego zastosowania.
Mikrokontrolery kontra mikroprocesory
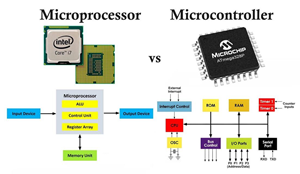
Rysunek 9. Porównanie mikroprocesora i mikrokontrolera
Chociaż mikrokontrolery (MCU) i mikroprocesory (MPU) wyglądają podobnie, pełnią różne funkcje.Rysunek 6 porównuje mikrokontroler (Microchip ATmega328P) z mikroprocesorem (Intel Core i7).Pokazuje, że MCU integruje procesor, pamięć i wejścia/wyjścia w jednym chipie, podczas gdy MPU opiera się na pamięci zewnętrznej i urządzeniach peryferyjnych.Poniższa tabela zawiera podsumowanie kluczowych różnic.
|
Aspekt |
Mikrokontroler (MCU) |
Mikroprocesor (MPU) |
|
Definicja |
Pojedynczy układ z procesorem, pamięcią i urządzeniami peryferyjnymi wejścia/wyjścia. |
Procesor wymagający pamięci zewnętrznej i komponentów we/wy. |
|
Integracja komponentów |
Procesor, pamięć Flash, pamięć RAM, timery i wejścia/wyjścia wbudowane w jeden układ scalony. |
W zestawie tylko procesor;inne części są zewnętrzne. |
|
Główne zastosowanie |
Zadania sterowania i automatyzacji w systemach wbudowanych. |
Szybkie przetwarzanie danych w komputerach stacjonarnych i serwerach. |
|
Typ pamięci |
Wbudowana pamięć Flash i RAM (np. 32 KB Flash, 2 KB RAM). |
Zewnętrzna pamięć RAM i pamięć (np. 16 GB DDR4, SSD). |
|
Szybkość zegara |
1–600 MHz (np. STM32 przy 216 MHz, ESP32 przy 240 MHz). |
1–5 GHz (np. Intel Core i7 @ 4,9 GHz). |
|
Zużycie energii |
Bardzo niski (10 µA–100 mA), idealny do urządzeń akumulatorowych. |
Wysoka (15–125 W), wymaga chłodzenia. |
|
Złożoność projektu |
Proste;potrzeba kilku części zewnętrznych. |
Złożony;potrzebuje dodatkowych chipów i pamięci. |
|
Czas rozruchu |
Natychmiastowe (< 10 ms). |
Wolniej (kilka sekund). |
|
Interfejsy |
Wbudowany ADC, DAC, PWM, UART, SPI, I²C. |
Wymaga zewnętrznych układów we/wy. |
|
Zestaw instrukcji |
Zwykle RISC (np. ARM, AVR). |
Zwykle CISC (np. x86, x64). |
|
Aplikacje |
Stosowany w robotach, IoT, urządzeniach, pojazdach. |
Stosowany w laptopach, komputerach stacjonarnych, serwerach. |
|
Przykładowe urządzenia |
ATmega328P, PIC16F877A, STM32, ESP32. |
Intel Core i7, AMD Ryzen, ARM Cortex-A. |
Zalety i ograniczenia
Zalety
• Wysoka wydajność umożliwiająca kontrolę w czasie rzeczywistym
• Uproszczona konstrukcja obwodów dzięki wbudowanym urządzeniom peryferyjnym
• Niezawodne i energooszczędne działanie
• Elastyczny dla różnych aplikacji wbudowanych
• Skalowalna architektura umożliwiająca przyszłe aktualizacje
Ograniczenia
• Wymaga specjalistycznych narzędzi programistycznych i wiedzy
• Ograniczona kompatybilność wsteczna ze starszymi systemami
• Wydajność może ulec pogorszeniu w trudnych warunkach środowiskowych
• Złożona konstrukcja wewnętrzna może utrudniać debugowanie
• Problemy z dostawami i czasem realizacji mogą mieć wpływ na produkcję
Aplikacje mikrokontrolerów
Automatyka przemysłowa
W automatyce przemysłowej mikrokontrolery są stosowane w programowalnych sterownikach logicznych (PLC), ramionach robotów i jednostkach sterujących silnikami.Regulują prędkość, moment obrotowy i czas procesu z dużą precyzją, poprawiając wydajność i bezpieczeństwo produkcji.Typowe przemysłowe mikrokontrolery obejmują serie ARM Cortex-M i PIC, znane z niezawodności i wydajności w trudnych warunkach.
Elektronika domowa
Mikrokontrolery zasilają urządzenia codziennego użytku, takie jak inteligentne oświetlenie, pralki, lodówki i systemy HVAC.Zarządzają czujnikami, kontrolują zużycie energii i umożliwiają automatyzację za pośrednictwem sieci inteligentnego domu, takich jak Zigbee, Wi-Fi lub Bluetooth.Urządzenia takie jak ATmega328P lub ESP32 sprawiają, że systemy te są responsywne, energooszczędne i łatwe w sterowaniu za pomocą smartfonów.
Urządzenia medyczne
W medycynie mikrokontrolery są stosowane w sprzęcie diagnostycznym, systemach monitorowania pacjenta, pompach infuzyjnych i przenośnych monitorach stanu zdrowia.Zapewniają dokładne pozyskiwanie danych z biosensorów, zapewniając jednocześnie pracę przy niskim poborze mocy w celu ciągłego monitorowania.Mikrokontrolery z certyfikatem bezpieczeństwa, takie jak rodziny STM32 lub MSP430, spełniają rygorystyczne normy regulacyjne wymagane w elektronice medycznej.
Systemy motoryzacyjne
Nowoczesne pojazdy w dużym stopniu opierają się na mikrokontrolerach do zarządzania silnikiem, sterowania skrzynią biegów, systemami informacyjno-rozrywkowymi, oświetleniem i systemami bezpieczeństwa, takimi jak poduszki powietrzne czy ABS.Mikrokontrolery klasy motoryzacyjnej obsługują dane z wielu czujników, zapewniając niezawodność nawet w ekstremalnych temperaturach.Do popularnych mikrokontrolerów motoryzacyjnych należą serie Infineon AURIX, NXP S32 i Renesas RH850.
Bezpieczeństwo i bezpieczeństwo
Mikrokontrolery odgrywają rolę w panelach alarmowych, biometrycznych systemach dostępu, czujnikach ruchu i urządzeniach monitorujących.Przetwarzają dane wejściowe czujników, wyzwalają reakcje i zarządzają szyfrowaniem w celu bezpiecznej transmisji danych.Mikrokontrolery małej mocy, takie jak TI MSP430 lub ARM Cortex-M0, zapewniają długoterminową i niezawodną pracę w zastosowaniach krytycznych dla bezpieczeństwa.
Komunikacja i IoT
W systemach komunikacyjnych i Internecie rzeczy (IoT) mikrokontrolery obsługują łączność bezprzewodową, łączenie czujników i zadania przetwarzania brzegowego.Są wbudowane w moduły Wi-Fi, inteligentne bramy i urządzenia do noszenia, które łączą się z platformami chmurowymi.Mikrokontrolery takie jak ESP32, nRF52 i STM32WB posiadają zintegrowaną technologię Bluetooth, Wi-Fi lub LoRa, zapewniając bezproblemową integrację z IoT.
Wniosek
Mikrokontrolery łączą procesor, pamięć i części wejścia/wyjścia w jeden mały, wydajny system.Występują w różnych rozmiarach bitów, aby sprostać prostym lub złożonym zadaniom kontrolnym.Dzięki niskiemu zużyciu energii, łatwemu programowaniu i szerokiemu zastosowaniu w wielu dziedzinach mikrokontrolery sprawiają, że nowoczesna technologia jest inteligentniejsza, szybsza i bardziej niezawodna w domach, gałęziach przemysłu, pojazdach i podłączonych urządzeniach.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Czy mikrokontroler może działać bez programowania?
Nie. Mikrokontroler potrzebuje oprogramowania sprzętowego lub kodu do wykonywania zadań.Bez programowania nie może odczytać wejść ani wyjść sterujących, sam jego sprzęt nie może podejmować decyzji ani wykonywać żadnych operacji.
2. Jaka jest różnica między płytką mikrokontrolera a gołym chipem MCU?
Układ mikrokontrolera to po prostu układ scalony, podczas gdy płytka rozwojowa (taka jak Arduino lub STM32 Nucleo) zawiera MCU oraz regulatory napięcia, interfejs USB i złącza, co ułatwia testowanie i opracowywanie projektów.
3. Jak zasilasz mikrokontroler?
Można go zasilać przez port USB, baterię lub regulowany zasilacz prądu stałego.Zawsze dopasowuj właściwy zakres napięcia, większość mikrokontrolerów pracuje w zakresie od 3,3 V do 5 V, aby uniknąć uszkodzenia.
4. Czy mikrokontrolery mogą łączyć się z Wi-Fi lub Bluetooth?
Tak.Wiele nowoczesnych mikrokontrolerów, takich jak ESP32, ESP8266 i STM32WB, zawiera wbudowane moduły Wi-Fi i Bluetooth.Inne mogą łączyć się z sieciami bezprzewodowymi za pomocą zewnętrznych modułów komunikacyjnych.
5. Jak wybrać pomiędzy mikrokontrolerami 8-bitowymi, 16-bitowymi i 32-bitowymi?
Wybierz wersję 8-bitową do prostych zadań sterujących, 16-bitową do systemów o średniej złożoności i 32-bitową do zaawansowanych aplikacji, które wymagają większej pamięci, szybkości i możliwości wielozadaniowości.

Aktywne i pasywne czujniki podczerwieni
na 2024/07/9
Co to jest wskaźnik BAUD?Kompletny przewodnik z porównywaniem tempa bitowania i przykładami
na 2025/09/16
Popularne posty
-

Złożone komputery zestawu instrukcji: Jak zmieniły obliczenia?
na 8000/04/17 147718
-

Pinout i funkcje USB-C
na 2000/04/17 111776
-
Korzystanie z prymitywnych symulacji XILINX: kompleksowy przewodnik po projekcie i symulacji FPGA
na 1600/04/17 111327
-

Napięcia zasilania w elektronice: znaczenie VCC, VDD, VEE, VSS i GND
na 0400/04/17 83645
-

RJ45 Podręcznik złącza: pinout, okablowanie, typy kablowe i zastosowania
na 1970/01/1 79325
-

Ostateczny przewodnik po kodach kolorów drutu w nowoczesnych systemach elektrycznych
Sposób, w jaki nasze systemy elektryczne używają kolorów, nie jest tylko dla wyglądu.Każdy kolor drutu wskazuje teraz określoną funkcję, ułatwiając poprawną identyfikację komponentów elektrycznych ...na 1970/01/1 66801
-

Jakość (Q) Współczynnik: Równania i zastosowania
Współczynnik jakości lub „Q” jest ważny podczas sprawdzania, jak dobrze induktory i rezonatory działają w systemach elektronicznych, które wykorzystują częstotliwości radiowe (RF).„Q” mierzy, jak d...na 1970/01/1 62963
-

Przewodnik zaworu oczyszczania: funkcja, objawy, testowanie i wymiana w celu optymalnej wydajności silnika
Zawór czyszczenia jest kluczową częścią systemu samochodu, który pomaga utrzymać w czystości powietrza poprzez zarządzanie oparami paliwowymi, zanim będą mogły uciec do atmosfery.To nie tylko pomag...na 1970/01/1 62852
-

Osiągnięcie wydajności szczytowej przy maksymalnym twierdzeniu o przeniesieniu mocy
Twierdzenie o maksymalnym przeniesieniu mocy wyjaśnia, w jaki sposób energia ze źródła, takiego jak akumulator lub generator, płynie do podłączonego obciążenia.Pokazuje dokładny warunek, w którym o...na 1970/01/1 54045
-

A23 Specyfikacje i kompatybilność baterii
Akumulator A23 to mała akumulator w kształcie cylindra o wysokim napięciu.Nazywany również 23a, 23E lub Mn21, działa przy 12 woltach i znacznie wyższy niż akumulatory AA lub AAA.Jego specj...na 1970/01/1 52027
Gorący numer części
-

0462-201-20141
TE Connectivity Deutsch Connectors
CONN SOCKET 20AWG NICKEL CRIMP
MIMXRT1061DVL6B
NXP USA Inc.
IC MCU 32BIT EXT MEM 196MAPBGA
SMAJ180A
Bourns Inc.
TVS DIODE 180VWM 292VC SMA
MF-R900-0-99
Bourns Inc.
PTC RESET FUSE 30V 9A RADIAL
T6V0S5-7
Diodes Incorporated
TVS DIODE 6VWM 23VC SOD523
ZVP3306A
Diodes Incorporated
MOSFET P-CH 60V 160MA TO92-3
CR2512-JW-153ELF
Bourns Inc.
RES SMD 15K OHM 5% 1W 2512
MSP430F437IPZR
Texas Instruments
IC MCU 16BIT 32KB FLASH 100LQFP
SMAJ16
Littelfuse Inc.
TVS DIODE 16VWM 27.3VC DO214AC
PI7C9X760ACLE
Diodes Incorporated
IC I2C/SPI TO UART BRIDGE 62PC
BAS40-05W
Infineon Technologies
BAS40 - HIGH SPEED SWITCHING, CL
IRLML6246TRPBF
Infineon Technologies
MOSFET N-CH 20V 4.1A SOT23
VI-2W0-IW
Vicor Corporation
DC DC CONVERTER 5V 100W
TPD8S300RUKR
Texas Instruments
SURGE SUPP 8VC 2-CIRCUIT 20WQFN
PSMN6R3-120PS
Nexperia USA Inc.
MOSFET N-CH 120V 70A TO220AB
MRF24WG0MB-I/RM
Micrel / Microchip Technology
RF TXRX MODULE WIFI U.FL ANT
UMC5NT1
onsemi
TRANS BRT NPN/PNP DUAL SOT-353
AD9554BCPZ
Analog Devices Inc.
IC CLOCK TRANSLATOR 8OUT 72LFCSP -

VT3060C-M3/4W
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 60V 15A TO-220AB
NLFV32T-2R2M-EF
TDK Corporation
FIXED IND 2.2UH 500MA 108MOHM SM
08051U3R9DAT2A
KYOCERA AVX
CAP CER 3.9PF 100V NP0 0805
TPS54218RTER
Texas Instruments
IC REG BUCK ADJUSTABLE 2A 16WQFN
FJY4010R
onsemi
TRANS PREBIAS PNP 200MW SOT523F
IRG4PSC71KD
Infineon Technologies
IGBT 600V 85A 350W SUPER247
DMP2240UW-7
Diodes Incorporated
MOSFET P-CH 20V 1.5A SOT323
SR211E473MARTR2
KYOCERA AVX
CAP CER RADIAL
MAX134CMH
Analog Devices Inc./Maxim Integrated
MAX134 3 3/4 DIGIT DMM CIRCUIT
MIC2776L-BM5TR
Microchip Technology
IC SUPERVISOR UPOWER LOW VOLT
UCD3138064RGCR
Texas Instruments
IC DGTL PWR CTRLR 64VQFN
TLV74211PDQNR
Texas Instruments
IC REG LINEAR 1.1V 200MA 4X2SON
MUR1620CTRG
onsemi
DIODE ARRAY GP 200V 8A TO220AB
74F244PC
Fairchild Semiconductor
IC BUFFER NON-INVERT 5.5V 20DIP
EMT1DXV6T1
onsemi
TRANS 2PNP 60V 0.1A SOT563
5M570ZT144C5N
Intel
IC CPLD 440MC 9NS 144TQFP
TPS62133AQRGTRQ1
Texas Instruments
IC REG BUCK 5V 3A 16VQFN
LMP7717MA
Texas Instruments
IC CMOS 1 CIRCUIT 8SOIC -

MP4569GQ-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJ 300MA 10QFN
ADCMP671-1YUJZ-RL7
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR TSOT6
SN74AVCH32T245ZKER
Texas Instruments
IC TRANSLTR BIDIRECTIONAL 96PBGA
MCIMX6S6AVM08ABR
NXP USA Inc.
IC MPU I.MX6S 800MHZ 624MAPBGA
AD7148ACPZ-1500RL7
Analog Devices Inc.
IC CAP-TO-DGTL CONV PROG 16LFCSP
TA0666A
TST
SAW FILTER, SM3030-6PAD, 920.000
SN1701022RSBT
Texas Instruments
PROTOTYPE
ATTINY88-15AZ
Microchip Technology
IC MCU 8BIT 8KB FLASH 32TQFP
ISL6569ACR
Renesas Electronics America Inc
IC REG CTRLR BUCK 32QFN
MAX4380EXT-T
Analog Devices Inc./Maxim Integrated
IC OPAMP VFB 1 CIRCUIT SC70-6
IRFR3518TRPBF
Infineon Technologies
MOSFET N-CH 80V 38A DPAK
UCD3138RJAR
Texas Instruments
IC DGTL PWR CTRLR 40VQFN
IRF3707PBF
Infineon Technologies
MOSFET N-CH 30V 62A TO220AB
AT27C010-70PC
Microchip Technology
IC EPROM 1MBIT PARALLEL 32DIP
IRL3705NSTRLPBF
Infineon Technologies
MOSFET N-CH 55V 89A D2PAK
IS46TR16640ED-125KBLA1
ISSI, Integrated Silicon Solution Inc
Automotive (Tc: -40 to +95C), 1G
UDZTE-175.1B
Rohm Semiconductor
DIODE ZENER 5.1V 200MW UMD2
502598-1793
Molex
0.3 FPC BACK FLIP HSG ASSY17CKTE