Zrozumienie problemów z zasilaniem podczas uruchamiania LPC84x i pełnej sekwencji włączania
Mikrokontrolery LPC84x są szeroko stosowane w systemach wbudowanych, ponieważ łączą moc obliczeniową, pamięć i urządzenia peryferyjne w kompaktowym urządzeniu.Aby zapewnić niezawodne działanie, musisz zrozumieć, w jaki sposób mikrokontroler uruchamia się i jak warunki zasilania wpływają na jego zachowanie.W tym artykule wyjaśniono kluczowe cechy i architekturę mikrokontrolerów LPC84x, wraz z ich wymaganiami dotyczącymi zasilania, mechanizmami resetowania i sekwencją uruchamiania.Omówiono także typowe problemy z zasilaniem podczas uruchamiania i praktyczne sposoby ich rozwiązywania.Katalog

Rysunek 1. Mikrokontroler LPC84x
Przegląd problemów z zasilaniem podczas uruchamiania LPC84x
Mikrokontrolery LPC84x są szeroko stosowane w systemach wbudowanych, ponieważ łączą możliwości przetwarzania, pamięć i urządzenia peryferyjne w kompaktowym i energooszczędnym urządzeniu.Niezawodne działanie zależy jednak w dużym stopniu od stabilnego i dobrze kontrolowanego procesu włączania zasilania.Podczas uruchamiania problemy takie jak niestabilne napięcie zasilania, niewłaściwa szybkość narastania napięcia lub niespójne warunki resetowania mogą mieć wpływ na inicjalizację mikrokontrolera.Te warunki mogą uniemożliwić urządzeniu osiągnięcie normalnej pracy lub opóźnić uruchomienie systemu.
Cechy mikrokontrolerów LPC84x
1. Rdzeń ARM Cortex-M0+
Seria LPC84x zbudowana jest wokół procesora ARM Cortex-M0+, który jest zoptymalizowany pod kątem niskiego zużycia energii i wydajnej wydajności.Ten 32-bitowy rdzeń obsługuje szybką obsługę przerwań i wykonywanie deterministyczne, dzięki czemu nadaje się do zastosowań wbudowanych.Jego prosta architektura pozwala na zbudowanie kompaktowego oprogramowania przy zachowaniu niezawodnych możliwości przetwarzania.Rdzeń obsługuje również standardowe narzędzia programistyczne ARM dla łatwiejszego programowania i debugowania.
2. Wbudowana pamięć Flash
Te mikrokontrolery zawierają wbudowaną pamięć flash służącą do przechowywania kodu programu i oprogramowania sprzętowego.Wewnętrzna pamięć flash zazwyczaj zapewnia wystarczającą ilość miejsca dla wbudowanych aplikacji bez konieczności stosowania zewnętrznych urządzeń pamięci.Zintegrowana pamięć flash umożliwia szybszy dostęp do instrukcji i poprawia ogólną wydajność systemu.Upraszcza to również konstrukcję sprzętu, ponieważ mikrokontroler może działać niezależnie po zaprogramowaniu.
3. Pamięć SRAM
Rodzina LPC84x integruje wewnętrzną pamięć SRAM do przechowywania danych w czasie wykonywania i operacji na stosach.Pamięć ta umożliwia szybki dostęp do zmiennych, buforów i tymczasowych danych przetwarzania.Szybka pamięć SRAM poprawia szybkość wykonywania, ponieważ procesor może uzyskać dostęp do danych bez czekania na pamięć zewnętrzną.Obsługuje także operacje wielozadaniowe w aplikacjach wbudowanych.
4. Elastyczne interfejsy komunikacji szeregowej
Dostępnych jest wiele urządzeń peryferyjnych do komunikacji, umożliwiających podłączenie zewnętrznych urządzeń i modułów.Należą do nich interfejsy UART do komunikacji szeregowej, interfejsy SPI do szybkiej komunikacji peryferyjnej oraz interfejsy I²C do sieci czujników i sterowania.Te wbudowane bloki komunikacyjne upraszczają integrację sprzętu w projektach wbudowanych.Można go używać do podłączania wyświetlaczy, czujników, urządzeń pamięci i innych komponentów cyfrowych.
5. Obsługa urządzeń peryferyjnych analogowych
Mikrokontrolery LPC84x zawierają zintegrowane funkcje analogowe, takie jak 12-bitowy przetwornik analogowo-cyfrowy (ADC).Dzięki temu urządzenie może mierzyć sygnały analogowe z czujników lub obwodów zewnętrznych.Niektóre warianty zawierają także funkcję przetwornika cyfrowo-analogowego (DAC) do generowania sygnałów analogowych.Możliwości te umożliwiają mikrokontrolerowi bezpośrednią komunikację z sygnałami.
6. Elastyczna konfiguracja we/wy
Piny wejścia/wyjścia ogólnego przeznaczenia (GPIO) umożliwiają interakcję mikrokontrolera z zewnętrznymi komponentami sprzętowymi.LPC84x zawiera elastyczne funkcje konfiguracji pinów, które umożliwiają przypisanie wielu funkcji do jednego pinu.Ta elastyczność pomaga zoptymalizować układy PCB i zmaksymalizować liczbę dostępnych urządzeń peryferyjnych.Piny GPIO można skonfigurować dla cyfrowych wejść, wyjść lub alternatywnych funkcji peryferyjnych.
7. Tryby pracy przy niskim poborze mocy
Dostępne są tryby niskiego poboru mocy, które zmniejszają zużycie energii w zastosowaniach zasilanych bateryjnie.Tryby te umożliwiają mikrokontrolerowi wyłączenie nieużywanych urządzeń peryferyjnych lub zmniejszenie częstotliwości zegara systemowego w okresach bezczynności.Funkcje zarządzania energią pomagają wydłużyć czas pracy baterii w urządzeniach przenośnych.W razie potrzeby system może szybko powrócić do aktywnej pracy.
8. Zintegrowane moduły czasowe i sterujące
Zintegrowane są różne moduły czasowe, które obsługują pomiar czasu, generowanie sygnału i kontrolę zdarzeń.Należą do nich liczniki o wielu szybkościach, liczniki z możliwością konfiguracji stanu i zegary watchdog.Timery umożliwiają precyzyjną kontrolę czasu w systemach wbudowanych, np. sterowanie silnikiem, synchronizację komunikacji lub okresowe planowanie zadań.Moduły te poprawiają niezawodność i wydajność systemu.
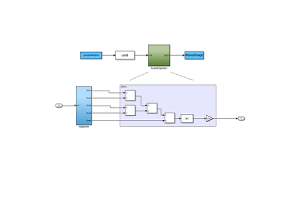
Przegląd schematu blokowego LPC84x

Rysunek 2. Schemat blokowy mikrokontrolera LPC84x
Architektura LPC84x integruje wiele bloków funkcjonalnych, które współpracują w celu wykonywania wbudowanych zadań przetwarzania.Sercem systemu jest procesor ARM Cortex-M0+, który wykonuje instrukcje programu przechowywane w wewnętrznej pamięci flash podczas dostępu do danych z SRAM.Wielowarstwowa matryca magistrali AHB łączy procesor z modułami pamięci i interfejsami peryferyjnymi, umożliwiając wydajną komunikację pomiędzy komponentami wewnętrznymi.Bloki generowania zegara i zarządzania energią kontrolują taktowanie systemu i zapewniają stabilną pracę urządzenia w różnych trybach wydajności.Interfejsy debugowania, takie jak SWD, umożliwiają programowanie i testowanie oprogramowania sprzętowego podczas programowania.Różne urządzenia peryferyjne, w tym timery, moduły komunikacyjne i interfejsy analogowe, są połączone poprzez system magistrali wewnętrznej, aby zapewnić interakcję z urządzeniami zewnętrznymi.Razem te bloki tworzą kompaktową architekturę mikrokontrolera zaprojektowaną z myślą o wydajnym wbudowanym sterowaniu.
Wymagania dotyczące zasilania LPC84x
|
Parametr |
Symbol |
Typowy / zakres |
|
Napięcie zasilania |
VDD |
1,8 V – 3,6 V |
|
Analogowe napięcie zasilania |
VDDA |
1,8 V – 3,6 V |
|
Napięcie robocze (typowe) |
VDD |
3,3 V |
|
Próg napięcia włączenia |
VPOR |
~1,5 V (typowo) |
|
Poziom napięcia Brown-Out |
VBOR |
Konfigurowalny (~1,7–2,7 V) |
|
Prąd trybu aktywnego |
IDD |
Zależne od urządzenia |
|
Prąd głębokiego snu |
IDD(DS) |
Bardzo niski (zakres µA) |
|
Maksymalne napięcie GPIO |
VIO |
Aż do VDD |
|
Zakres temperatury roboczej |
TA |
−40°C do +105°C |
|
Zalecany kondensator odsprzęgający |
— |
0,1 µF w pobliżu każdego pinu VDD |
LPC84x resetuje źródła i zachowanie podczas uruchamiania
Reset po włączeniu zasilania (POR)
Power-On Reset (POR) to wewnętrzny mechanizm resetowania, który aktywuje się automatycznie po pierwszym włączeniu zasilania mikrokontrolera LPC84x.Jego głównym celem jest utrzymanie systemu w stanie resetu, dopóki napięcie zasilania nie osiągnie bezpiecznego poziomu roboczego.Po włączeniu urządzenia obwód POR monitoruje napięcie zasilania i zapobiega przedwczesnemu wykonaniu instrukcji przez procesor.Gdy napięcie się ustabilizuje, stan resetowania zostaje zwolniony i procesor rozpoczyna wykonywanie kodu z wewnętrznej pamięci flash.Dzięki temu mikrokontroler zawsze uruchamia się w przewidywalnym stanie po włączeniu zasilania.W architekturze wewnętrznej system resetowania współdziała z zegarem i blokami zarządzania energią przed rozpoczęciem normalnej pracy.Mechanizm ten stanowi podstawę procesu uruchamiania LPC84x.
Reset zaniku napięcia (BOR)
Brown-Out Reset (BOR) to mechanizm zabezpieczający, który resetuje mikrokontroler LPC84x, gdy napięcie zasilania spadnie poniżej bezpiecznego progu roboczego.Jego celem jest zapobieganie pracy procesora przy niestabilnym napięciu, które mogłoby spowodować nieprzewidywalne zachowanie.Kiedy napięcie spadnie poniżej skonfigurowanego poziomu, obwód BOR wyzwala reset systemu, aby chronić stany pamięci i urządzeń peryferyjnych.Po powrocie napięcia zasilania do stabilnego poziomu urządzenie uruchamia się normalnie.Ta funkcja pomaga utrzymać niezawodną pracę w systemach, w których mogą wystąpić wahania zasilania.W architekturze wewnętrznej obwody monitorowania napięcia współpracują z blokiem sterowania mocą w celu wykrywania warunków niskiego napięcia.Dzięki temu mikrokontroler może bezpiecznie odzyskać siły po chwilowych spadkach napięcia.
Zewnętrzny pin resetujący (RESET)
Zewnętrzny pin RESET zapewnia sprzętową metodę resetowania mikrokontrolera LPC84x spoza układu.Umożliwia zewnętrznym urządzeniom lub sygnałom sterującym wymuszenie resetu mikrokontrolera, jeśli zajdzie taka potrzeba.Gdy sygnał RESET stanie się aktywny, procesor przestaje wykonywać instrukcje i powraca do stanu początkowego.Gwarantuje to, że system będzie mógł zostać bezproblemowo uruchomiony ponownie podczas określonych zdarzeń operacyjnych.Po wydaniu sygnału resetu urządzenie wykonuje wewnętrzny proces inicjalizacji przed ponownym uruchomieniem oprogramowania sprzętowego.Zewnętrzna kontrola resetowania jest często używana podczas programowania, debugowania lub nadzoru systemu.W wewnętrznej strukturze systemu ta ścieżka resetowania łączy się bezpośrednio z centralnym sterownikiem resetowania.
Resetowanie psa stróżującego
Reset watchdoga ma miejsce, gdy licznik czasu watchdoga wykryje, że oprogramowanie systemowe nie działa już poprawnie.Zegar watchdog stale monitoruje wykonanie programu, wymagając okresowych aktualizacji działającego oprogramowania sprzętowego.Jeżeli oprogramowaniu nie uda się odświeżyć licznika czasu w oczekiwanym czasie, licznik czasu wygaśnie i spowoduje zresetowanie systemu.Mechanizm ten chroni system przed awariami oprogramowania, nieskończonymi pętlami lub nieoczekiwanymi błędami oprogramowania sprzętowego.Po zresetowaniu mikrokontroler uruchamia się ponownie i ponownie rozpoczyna wykonywanie programu.W architekturze wewnętrznej licznik czasu watchdog działa wraz z logiką sterowania systemem i timerami.Jego celem jest poprawa ogólnej niezawodności systemu i utrzymanie ciągłej pracy w systemach wbudowanych.
Sekwencja włączania LPC84x
1. Stabilizacja zasilania
Kiedy napięcie zasilania jest podawane po raz pierwszy, obwody wewnętrzne wymagają krótkiego czasu, aby napięcie zasilania się ustabilizowało.Na tym etapie wewnętrzne regulatory i bloki zarządzania energią ustalają właściwy poziom napięcia dla procesora i urządzeń peryferyjnych.Podczas tej stabilizacji mikrokontroler pozostaje nieaktywny.Zapobiega to zawodnemu zachowaniu na wczesnym etapie włączania zasilania.Stabilne napięcie zapewnia prawidłową pracę wewnętrznych obwodów logicznych.
2. Aktywacja resetowania po włączeniu zasilania
Gdy zasilanie zacznie się stabilizować, obwód resetowania po włączeniu zasilania utrzymuje procesor w stanie resetu.Reset ten uniemożliwia procesorowi wykonywanie instrukcji, dopóki napięcie nie osiągnie bezpiecznego poziomu.Na tym etapie regulator resetowania stale monitoruje napięcie zasilania.Dopiero gdy napięcie przekroczy wymagany próg, reset zaczyna się zwalniać.Gwarantuje to, że mikrokontroler zacznie od czystego stanu systemu.
3. Inicjalizacja zegara wewnętrznego
Po usunięciu warunków resetowania mikrokontroler inicjuje swój wewnętrzny układ zegara.Generator zegara uruchamia wewnętrzny oscylator, który zapewnia synchronizację operacji procesora i urządzeń peryferyjnych.Zegar ten staje się głównym punktem odniesienia taktowania dla wykonania systemu.Procesor nie może wykonywać instrukcji bez stabilnego źródła zegara.Dlatego inicjalizacja zegara jest ważnym etapem uruchamiania systemu.
4. Inicjalizacja pamięci
W kolejnym etapie procesor przygotowuje struktury pamięci wewnętrznej wykorzystywane przez program.Pamięć Flash dostarcza instrukcje oprogramowania sprzętowego, podczas gdy SRAM przechowuje dane wykonawcze.System przygotowuje także tablicę wektorów służącą do obsługi przerwań.Taka konfiguracja pamięci umożliwia procesorowi prawidłowe zlokalizowanie punktu wejścia programu.Prawidłowa inicjalizacja pamięci zapewnia płynne wykonanie oprogramowania sprzętowego.
5. Inicjalizacja urządzeń peryferyjnych
Po przygotowaniu pamięci system udostępnia ważne wewnętrzne urządzenia peryferyjne.Te urządzenia peryferyjne mogą obejmować timery, moduły komunikacyjne i rejestry sterujące wymagane przez oprogramowanie sprzętowe.Niektóre urządzenia peryferyjne pozostają wyłączone, dopóki aplikacja ich nie aktywuje.Etap inicjalizacji zapewnia gotowość podstawowego środowiska systemu.Ten krok przygotowuje urządzenie do uruchomienia aplikacji.
6. Rozpoczyna się wykonywanie oprogramowania sprzętowego
Po zakończeniu wszystkich etapów wewnętrznej inicjalizacji procesor rozpoczyna wykonywanie oprogramowania sprzętowego zapisanego w pamięci flash.Wykonywanie zwykle rozpoczyna się od wektora resetowania zdefiniowanego w kodzie programu.Od tego momentu wbudowana aplikacja steruje pracą systemu.Oprogramowanie sprzętowe konfiguruje urządzenia peryferyjne, przetwarza sygnały wejściowe i wykonuje zadania systemowe.Oznacza to przejście od uruchamiania sprzętu do czasu działania aplikacji.
Typowe problemy z zasilaniem podczas uruchamiania LPC84x
• Powolny wzrost napięcia podczas włączania zasilania
Jeżeli napięcie zasilania rośnie zbyt wolno, wewnętrzne obwody resetujące mogą zachowywać się w nieprzewidywalny sposób.Powolne narastanie może opóźnić prawidłowe zwolnienie resetu i wpłynąć na inicjalizację urządzenia.W niektórych systemach procesor może podjąć próbę uruchomienia, zanim napięcie będzie w pełni stabilne.Może to skutkować niespójnym zachowaniem podczas uruchamiania.
• Hałas lub niestabilność zasilania
Szum elektryczny w linii zasilającej może zakłócać stabilny rozruch mikrokontrolera.Hałas może powodować tymczasowe spadki napięcia, które powodują niezamierzone resetowanie.Fluktuacje te mogą wpływać na zegar wewnętrzny i obwody logiczne.W rezultacie mikrokontroler może wielokrotnie uruchamiać się ponownie.
• Niewystarczające kondensatory odsprzęgające
Słabe odłączenie w pobliżu pinów zasilania mikrokontrolera może powodować niestabilne napięcie podczas uruchamiania.Szybkie zmiany prądu wewnątrz chipa wymagają pobliskich kondensatorów w celu ustabilizowania zasilania.Bez odpowiedniego oddzielenia mogą wystąpić skoki napięcia.Ta niestabilność może mieć wpływ na inicjalizację systemu.
• Spadek napięcia podczas uruchamiania
Jeśli zasilacz nie jest w stanie zapewnić wystarczającego prądu przy uruchomieniu, napięcie może na krótko spaść.Sytuacja ta może wywołać warunki resetowania napięcia.Takie spadki mogą wystąpić, gdy inne komponenty systemu uruchamiają się jednocześnie.Te tymczasowe spadki mogą przerwać proces uruchamiania.
•Zresetuj niestabilność sygnału
Zewnętrzne sygnały resetowania, które zmieniają się podczas włączania zasilania, mogą powodować wielokrotne resetowanie.Jeśli sygnał resetowania nie pozostanie stabilny, mikrokontroler może nigdy nie zakończyć swojej inicjalizacji.Może to uniemożliwić normalne działanie oprogramowania sprzętowego.Do niezawodnego uruchomienia wymagane są stabilne warunki resetowania.
• Niewłaściwa dostępność źródła zegara
Jeśli system opiera się na zewnętrznym źródle zegara, które nie uruchamia się poprawnie, procesor może nie działać prawidłowo.Bez stabilnego sygnału zegarowego nie można rozpocząć wykonywania instrukcji.Może to spowodować, że system będzie sprawiał wrażenie niereagującego.Stabilność zegara jest ważna dla normalnego uruchamiania mikrokontrolera.
Rozwiązywanie problemów z uruchamianiem LPC84x
• Sprawdź stabilność napięcia zasilania
Pierwszym krokiem w rozwiązywaniu problemów jest pomiar napięcia zasilania mikrokontrolera za pomocą oscyloskopu lub multimetru.Podczas uruchamiania napięcie powinno mieścić się w zalecanym zakresie roboczym.Wszelkie nagłe spadki lub skoki mogą wskazywać na niestabilność zasilania.Obserwacja przebiegu napięcia podczas włączania zasilania może ujawnić ukryte problemy.Stabilne napięcie jest ważne dla niezawodnej inicjalizacji mikrokontrolera.
• Sprawdź zerowanie czasu sygnału
Sygnał resetu powinien pozostać stabilny i odpowiednio zsynchronizowany z procesem załączenia zasilania.Wiele osób często monitoruje pin resetowania, aby potwierdzić, że podczas uruchamiania zachowuje się zgodnie z oczekiwaniami.Niestabilny lub zaszumiony sygnał resetowania może wielokrotnie uruchamiać system.Sprawdzenie czasu resetowania zapewnia, że inicjalizacja nastąpi dopiero po ustabilizowaniu się zasilania.Prawidłowe zachowanie resetowania zapewnia prawidłowe uruchomienie systemu.
• Sprawdź filtrowanie zasilacza
Należy dokładnie sprawdzić elementy filtrujące moc, takie jak kondensatory odsprzęgające.Kondensatory te pomagają utrzymać stabilne napięcie podczas szybkich zmian prądu.Złe umiejscowienie lub niewystarczająca pojemność mogą spowodować wpływ szumu napięciowego na mikrokontroler.Zapewnienie odpowiedniego filtrowania poprawia niezawodność uruchamiania.Kontrola sprzętu może często ujawnić brakujące lub nieprawidłowo umieszczone kondensatory.
• Potwierdź działanie źródła zegara
Aby procesor mógł wykonać instrukcje, zegar systemowy musi działać prawidłowo.Sprawdź sygnały oscylatora, aby potwierdzić prawidłowe działanie.Jeśli źródło zegara nie uruchomi się, procesor nie będzie mógł uruchomić oprogramowania sprzętowego.Monitorowanie sygnału zegara pomaga określić, czy obwody czasowe działają prawidłowo.Do normalnego uruchomienia wymagana jest niezawodna praca zegara.
• Sprawdź kod inicjowania oprogramowania sprzętowego
Kod startowy zawarty w oprogramowaniu sprzętowym może mieć wpływ na zachowanie systemu przy inicjalizacji.Przejrzyj procedury obsługi resetowania i inicjalizacji systemu.Nieprawidłowa konfiguracja rejestrów systemowych lub urządzeń peryferyjnych może opóźnić normalne działanie.Weryfikacja kodu startowego gwarantuje, że oprogramowanie sprzętowe prawidłowo inicjuje sprzęt.Kontrola oprogramowania uzupełnia debugowanie sprzętu.
• Obserwuj zachowanie podczas uruchamiania za pomocą narzędzi debugowania
Interfejsy debugowania, takie jak SWD, pozwalają monitorować aktywność procesora podczas uruchamiania.Używając narzędzi do debugowania, sprawdź, czy procesor osiąga główny punkt wejścia programu.Punkty przerwania i dzienniki debugowania pomagają ujawnić, gdzie kończy się inicjalizacja.Metoda ta zapewnia cenny wgląd w zachowanie systemu na wczesnych etapach uruchamiania.
Wniosek
Niezawodne uruchomienie mikrokontrolera LPC84x zależy od stabilnego zasilania, prawidłowego resetowania i prawidłowo działającego układu zegara.Ważne etapy uruchamiania obejmują stabilizację zasilania, zwolnienie resetu, ustawienie zegara, przygotowanie pamięci i wykonanie oprogramowania sprzętowego.Problemy takie jak spadki napięcia, szumy, słabe odsprzęganie lub niestabilne sygnały resetowania mogą przerwać ten proces.Staranny projekt zasilania i systematyczne rozwiązywanie problemów pomagają zapewnić spójny rozruch i stabilną pracę systemu.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Do czego służy mikrokontroler LPC84x?
Mikrokontroler LPC84x jest powszechnie stosowany w systemach wbudowanych, które wymagają niskiego zużycia energii i kompaktowego sprzętu.Typowe zastosowania obejmują przemysłowe systemy sterowania, interfejsy czujników, elektronikę użytkową i urządzenia IoT.
2. Jakich narzędzi programistycznych można użyć do programowania mikrokontrolerów LPC84x?
Możesz programować urządzenia LPC84x za pomocą narzędzi kompatybilnych z ARM, takich jak Keil MDK, MCUXpresso IDE lub IAR Embedded Workbench.Środowiska te obsługują debugowanie, kompilację i tworzenie oprogramowania sprzętowego.
3. Czy mikrokontroler LPC84x wymaga zewnętrznego oscylatora kwarcowego?
Nie, LPC84x zawiera wewnętrzny oscylator, który może generować zegar systemowy.Jednak w niektórych zastosowaniach można zastosować zewnętrzny kryształ w celu uzyskania większej dokładności pomiaru czasu.
4. Jaka jest maksymalna częstotliwość taktowania mikrokontrolerów LPC84x?
Większość urządzeń LPC84x działa z częstotliwością taktowania do około 30 MHz.Prędkość ta pozwala na wydajne przetwarzanie przy zachowaniu niskiego zużycia energii.
5. Czy mikrokontrolery LPC84x można stosować w urządzeniach zasilanych bateryjnie?
Tak, urządzenia LPC84x zaprojektowano z wieloma trybami niskiego poboru mocy, które zmniejszają zużycie energii w okresach bezczynności.Dzięki temu nadają się do stosowania w przenośnych urządzeniach elektronicznych, węzłach IoT i systemach wbudowanych zasilanych bateryjnie.

Co to jest bateria H7?Rozmiar, funkcje i zastosowania pojazdu
na 2026/03/10

Zrozumienie złączy DVI: wszystko, co musisz wiedzieć
na 2026/03/9
Popularne posty
-

Złożone komputery zestawu instrukcji: Jak zmieniły obliczenia?
na 8000/04/18 147761
-

Pinout i funkcje USB-C
na 2000/04/18 111984
-
Korzystanie z prymitywnych symulacji XILINX: kompleksowy przewodnik po projekcie i symulacji FPGA
na 1600/04/18 111351
-

Napięcia zasilania w elektronice: znaczenie VCC, VDD, VEE, VSS i GND
na 0400/04/18 83743
-

RJ45 Podręcznik złącza: pinout, okablowanie, typy kablowe i zastosowania
na 1970/01/1 79535
-

Ostateczny przewodnik po kodach kolorów drutu w nowoczesnych systemach elektrycznych
Sposób, w jaki nasze systemy elektryczne używają kolorów, nie jest tylko dla wyglądu.Każdy kolor drutu wskazuje teraz określoną funkcję, ułatwiając poprawną identyfikację komponentów elektrycznych ...na 1970/01/1 66946
-

Przewodnik zaworu oczyszczania: funkcja, objawy, testowanie i wymiana w celu optymalnej wydajności silnika
Zawór czyszczenia jest kluczową częścią systemu samochodu, który pomaga utrzymać w czystości powietrza poprzez zarządzanie oparami paliwowymi, zanim będą mogły uciec do atmosfery.To nie tylko pomag...na 1970/01/1 63087
-

Jakość (Q) Współczynnik: Równania i zastosowania
Współczynnik jakości lub „Q” jest ważny podczas sprawdzania, jak dobrze induktory i rezonatory działają w systemach elektronicznych, które wykorzystują częstotliwości radiowe (RF).„Q” mierzy, jak d...na 1970/01/1 63026
-

Osiągnięcie wydajności szczytowej przy maksymalnym twierdzeniu o przeniesieniu mocy
Twierdzenie o maksymalnym przeniesieniu mocy wyjaśnia, w jaki sposób energia ze źródła, takiego jak akumulator lub generator, płynie do podłączonego obciążenia.Pokazuje dokładny warunek, w którym o...na 1970/01/1 54092
-

A23 Specyfikacje i kompatybilność baterii
Akumulator A23 to mała akumulator w kształcie cylindra o wysokim napięciu.Nazywany również 23a, 23E lub Mn21, działa przy 12 woltach i znacznie wyższy niż akumulatory AA lub AAA.Jego specj...na 1970/01/1 52168
Gorący numer części
-

FPF2303MX
Fairchild Semiconductor
DUAL OUTPUT CURRENT LIMIT SWITCH
PCI4515AGHK
Texas Instruments
PCMCIA BUS CONTROLLER PBGA257
FTSH-110-04-F-DV-P-TR
Samtec Inc.
CONN HEADER SMD 20POS 1.27MM
245806030112829+
KYOCERA AVX
BOARD TO BOARD
VNP7N04
STMicroelectronics
IC PWR DRIVER N-CHAN 1:1 TO220AB
KST4124MTF
onsemi
TRANS NPN 25V 0.2A SOT23-3
CGA5K4X7R2J223M130AE
TDK Corporation
CAP CER 0.022UF 630V X7R 1206
MAX772ESA
Analog Devices Inc./Maxim Integrated
IC REG CTRLR BOOST 8SOIC
FDP050AN06A0
onsemi
MOSFET N-CH 60V 18A/80A TO220-3
LW005A4
ABB Power Electronics Inc.
DC DC CONVERTER 5V 5W
04661.25NRHF
Littelfuse Inc.
FUSE BOARD MOUNT 1.25A 63VAC/VDC
2N5190
Central Semiconductor Corp
TRANS NPN 40V 4A TO126
GCM0335C1E3R6CD03D
Murata Electronics
CAP CER 3.6PF 25V C0G/NP0 0201
SM75057EL
Bourns Inc.
PWR XFMR SMD
12061A101MAT2A
KYOCERA AVX
CAP CER 100PF 100V NP0 1206
74271131
Würth Elektronik
FERRITE CORE 246 OHM HINGED
ISL99360FRZ-T
Renesas Electronics America Inc
SMART POWER STAGE GEN2 (SPS) MOD
TDA7802PDTR
STMicroelectronics
IC AMP D QUAD 72W POWERSO-36 -

BAS70-06FILM
STMicroelectronics
DIODE ARRAY SCHOTTKY 70V SOT23-3
DRA628PC7IZKKQ1
Texas Instruments
PROTOTYPE
TSC2100IDAG4
Texas Instruments
IC SCREEN CNTRL 12BIT 32TSSOP
UCC27325D
Texas Instruments
IC GATE DRVR LOW-SIDE 8SOIC
MAX5056BASA+T
Analog Devices Inc./Maxim Integrated
IC GATE DRVR LOW-SIDE 8SOIC
RT5795AGQW
Richtek USA Inc.
IC REG BUCK ADJ 2A 8WDFN-SL
74HC74D
Toshiba Semiconductor and Storage
IC FF D-TYPE DUAL 1BIT 14SOIC
MP2104DQT-LF-Z
Monolithic Power Systems Inc.
IC REG BUCK ADJ 600MA 6TQFN
XPC823EVR75B2
NXP USA Inc.
IC MPU MPC8XX 75MHZ 256BGA
7443320820
Würth Elektronik
FIXED IND 8.2UH 13A 11.8MOHM SMD
LT3495EDDB-1#TRPBF
Analog Devices Inc.
IC REG BST SEPIC ADJ 275MA 10DFN
VI-B51-EU-BM
Vicor Corporation
VI-B51-EU-BM 150V/12V
HCPL-786J-500E
Broadcom Limited
IC ISOLATED MODULE 12BIT 16SO
AD9708ARURL7
Analog Devices Inc.
IC DAC 8BIT A-OUT 28TSSOP
ABS06L-32.768KHZ-T
Abracon LLC
CRYSTAL 32.7680KHZ 12.5PF SMD
SBR10150CT
Diodes Incorporated
DIODE ARRAY SBR 150V 5A TO220AB
1N4048R
Vishay General Semiconductor - Diodes Division
DIODE GEN PURP 250V 275A DO205AB
PIC18F65K80-I/MR
Microchip Technology
IC MCU 8BIT 32KB FLASH 64VQFN -

BR24G256FV-3GTE2
Rohm Semiconductor
IC EEPROM 256KBIT I2C 8SSOPB
FSV15120V
Fairchild Semiconductor
RECTIFIER DIODE, SCHOTTKY, 120V,
NP043A200A
Panasonic Electronic Components
TRANS PREBIAS NPN/PNP SSSMINI6
AD5247BKS10-R2
Analog Devices Inc.
IC POT DGTL 10K 128POS SC70-6
R1242S001B-E2-FE
Nisshinbo Micro Devices Inc.
3A 30V INPUT PWM STEP-DOWN DCDC
FCP190N60-GF102
onsemi
MOSFET N-CH 600V 20.2A TO220-3
MAX170DCPA
Analog Devices Inc./Maxim Integrated
IC ADC 12BIT SAR 8DIP
SZMMBZ5249BLT1G
onsemi
DIODE ZENER 19V 225MW SOT23-3
ATTINY861-20MU
Microchip Technology
IC MCU 8BIT 8KB FLASH 32VQFN
MMA02040C2207JB300
Vishay Beyschlag/Draloric/BC Components
RES 0.22 OHM 5% 0.4W 0204
CL03A474MQ3NNNH
Samsung Electro-Mechanics
CAP CER 0.47UF 6.3V X5R 0201
TSC2003IZQCR
Texas Instruments
IC SCREEN CNTRL 12BIT 48BGA
BCM54294B0IFBG
Broadcom Limited
QUAD GPHY WITH SGMII/DUAL MEDIAL
LC75348M-TLM-E
onsemi
IC ELECTRONIC VOLUME CTRL MPF30S
XF2J-1424-11A
Omron Electronics Inc-EMC Div
CONN FPC VERT 14POS 0.5MM SMD
MLF1608A1R0JT000
TDK Corporation
FIXED IND 1UH 50MA 500 MOHM SMD
75545-5004
Molex
ASSY RECEP 80 AMP MODULE TIN TAI
KF80BDT-TR
STMicroelectronics
IC REG LINEAR 8V 500MA DPAK