TB6600 STERPPER STEROWNIK: Pinout, interfejs Arduino i jak działa
Katalog

Przegląd modułu silnika silnika TB6600
. TB6600 Moduł sterownika silnika krokowego to urządzenie wyróżniające się jego odpornością i zdolnością adaptacyjną do kontrolowania silników krokowych.Bezproblemowo łączy się z szeroką gamą mikrokontrolerów, głównie Arduino, sprzyjając tworzeniu dokładnych wyjść cyfrowych 5V.Wyjścia te są dynamiczne dla utrzymania delikatnej równowagi kontroli silnika.Działając w zakresie napięcia 9-42V DC i obsługując szczyt prądu 4 amperów, jest to wszechstronny wybór dla różnych projektów napędzanych silnikami.Ta zdolność adaptacyjna pozwala skutecznie zarządzać pozycjonowaniem i szybkością silnika, co jest bardzo korzystne w aplikacjach, które mają na celu zminimalizowanie złożoności kodowania.Izolacja optocupler o wysokiej częstotliwości modułu znacznie zwiększa jego niezawodność poprzez zmniejszenie ryzyka zakłóceń i zapewnienie stałej eksploatacji.
Harmonia z wieloma mikrokontrolerami sprawia, że kierowca TB6600 jest dopasowanym wyborem dla projektów wymagających misternej kontroli silnika.Łącznie integruje się z platformami takimi jak Arduino, odzwierciedlając swoją zdolność do spełnienia różnorodnych oczekiwań.Na przykład użycie tego sterownika w maszynach CNC lub drukarkach 3D umożliwia precyzyjny i kontrolowany ruch, który ilustruje jego użyteczność w różnych dziedzinach.
Ten moduł wyróżnia się dzięki wsparciu silników krokowych zarówno 2-fazowych, jak i 4-fazowych, a także konfiguracji hybrydowych.Konstrukcja bipolarnego m-mostu H jest integralna w zakresie wydajnego zarządzania napięciem i prądem, zapewniając, że kierowca zapewnia szczytową wydajność w swoich aplikacjach.W środowiskach, w których precyzja i niezawodność jest priorytetowa, takie jak zautomatyzowane linie produkcyjne i robotyka, funkcje te są wysoko cenione.
Cechy
|
Funkcja |
Opis |
|
Typ kierowcy |
Dubolar H-m-mostek DC |
|
Wyjście bieżące opcje |
8 rodzajów (0,5A do 3,5A), wybierane do 4 wzmacniaczy |
|
Tryby podziału |
Dzieli do 32, wybierane w 6 trybach |
|
Opcje mikro kroków |
8 rodzajów (1, 2/a, 2/b, 4, 8, 16, 32) |
|
Izolacja sygnału wejściowego |
Szybkie separacja fotoelektryczna |
|
Interfejs |
Pełny standardowy interfejs pojedynczego impulsu |
|
Funkcja wstrzymania offline |
Tak |
|
Przydatność środowiska |
Częściowo zamknięte ciało dla trudnych środowisk |
|
Funkcja blokady zasilania |
Półautomatyczny, oszczędny energia |
Konfiguracja pinów

Specyfikacje techniczne
|
Specyfikacja |
Bliższe dane |
|
Napięcie robocze |
9-40 V DC |
|
Prąd wyjściowy |
0,7a-4,0a (możliwe do wyboru w 8 krokach za pomocą przełączników DIP) |
|
Częstotliwość impulsu wejściowego |
Do 20 kHz |
|
Poziomy sygnału wejściowego |
Poziomy sygnału 5V |
|
Puls na rewolucję |
200-6400 |
|
Prąd sygnału logicznego |
8a-15a |
|
Kompatybilność silnika |
Odpowiednie dla silników krokowych 2-fazowych i 4-fazowych |
|
Funkcje ochrony |
Nadmierny prąd, ochrona przegrzania |
|
Izolacja wejściowa |
Optycznie odizolowane |
|
Odporność na izolację |
500 Megohms |
|
Tryb obsługiwany |
Tryb PUL/FIR |
|
Koszt |
Niski koszt |
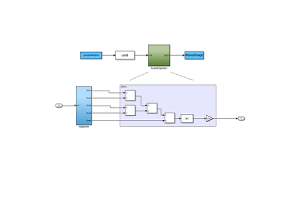
Konfiguracja obwodu m-mostko dla TB6600
Moduł sterownika silnikowego TB6600 jest poważnym komponentem zaprojektowanym do sterowania silnikami krokowymi zarówno 2-fazowym, jak i 4-fazowym, wykorzystującym konfigurację mostka H do wydajnego działania.Ta konfiguracja wykorzystuje tranzystory MOSFET, aby zapewnić wysoką wydajność pod względem obecnej obsługi i stabilności termicznej.Moduł działa poprzez interakcje z dwoma pierwotnymi kołkami sterującymi: kodem kroku, który uruchamia silnik z każdym impulsem, oraz kołek kierunkowy, który określa kierunek obrotowy silnika na podstawie przyłożonego napięcia.Razem te wejścia umożliwiają precyzyjną kontrolę nad sekwencją przesuwaną silnika i kierunkiem obrotu.

Schemat obwodu podkreśla cztery kluczowe tranzystory, T1, T2, T3 i T4, ułożone w strukturze mostka H.Te MOSFETS są kręgosłupem działania modułu, umożliwiając dwukierunkowy przepływ prądu potrzebny do napędzania silnika krokowego.Ponadto schemat obejmuje diody flybacka (D1, D2, D3 i D4), które są kluczem do ochrony obwodu przed skokami napięcia spowodowanymi przez obciążenie indukcyjne silnika.Diody te zapobiegają nadprądowi i uszkodzeniu wrażliwych komponentów podczas pracy.Do podłączania silnika używane są zaciski A+, A-, B+i B, zapewniając dokładny i kontrolowany ruch wału silnika.
Jak most H umożliwia obrót silnika?
Sterownik TB6600 działa poprzez skoordynowane działanie tranzystorów MOSFET w mostku H.Na przykład:
• Obrót zgodnie z ruchem wskazówek zegara występuje, gdy tranzystory T1 i T4 są aktywowane, kierując przepływ prądu z A+ do A-.
• Obrót w kierunku przeciwnym do ruchu wskazówek zegara ma miejsce, gdy T2 i T3 są zaangażowane, cofając przepływ prądu z A- do A+.
Ta naprzemienna aktywacja tranzystorów zapewnia płynny ruch dwukierunkowy.Aby osiągnąć optymalny moment obrotowy i wydajne, niezbędne są precyzyjne regulacje czasowe i napięcia.
Tryby działania wszechstronnego sterowania
TB6600 obsługuje cztery odrębne tryby działania, każdy zaprojektowany do równowagi momentu obrotowego, precyzji i wielkości kroku, w zależności od wymagań aplikacji:
• • Tryb falowy: W tym trybie tylko jedna cewka jest pobierana jednocześnie.Aktywacja pojedynczej cewki obraca silnik o 90 stopni w jednym kierunku, jednocześnie odwracając prąd obraca go w przeciwnym kierunku.Przemierzając cewki, silnik osiąga ciągłe działanie.Ten tryb jest prosty, ale zapewnia mniejszy moment obrotowy w porównaniu z innymi trybami.
• • Tryb całkowitego: Obie cewki są energetyzowane jednocześnie w tym trybie, generując silniejsze pole magnetyczne.Powoduje to zwiększony moment obrotowy, co czyni go idealnym do zastosowań wymagających większej mocy i stabilności.
• • Tryb pół etapu: Kombinacja trybu fali i trybu całego stopnia, ten tryb przemieszcza energetyzowanie pojedynczej cewki i obu cewek.Skutecznie zmniejsza wielkość kroku do 45 stopni, zapewniając równowagę między precyzją a momentem obrotowym.Jednak moment obrotowy może się różnić w zależności od tego, czy jedna lub obie cewki są energetyzowane podczas określonego kroku.
• • Tryb Microstep : Najbardziej precyzyjne ze wszystkich trybów tryb Microstep zmniejsza rozmiar kroku jeszcze bardziej poprzez staranne modulowanie prądu przez fazy silnika.Osiąga się to za pomocą zaawansowanych obwodów do tworzenia płynnych i stopniowych przejść między krokami.Ten tryb jest idealny do zastosowań wymagających wysokiego precyzji i spójnego momentu obrotowego, takich jak maszyny CNC lub robotyka.
Integracja TB6600 z Arduino Uno
Efektywna kontrola silników krokowych wymaga połączenia niezawodnego sprzętu i starannie zaprogramowanego oprogramowania.Sterownik stepowy TB6600 wyróżnia się jako doskonałe narzędzie do obsługi 2-fazowych silników krokowych.Obsługuje wiele trybów operacyjnych, takich jak fala, pełny stopień, pół etapy i mikro-stepping.Jego wbudowane cechy ochrony-w tym zabezpieczenia przed niskim napięciem, nadprądem i przegrzaniem-powodują solidny wybór dla projektów wymagających precyzji i trwałości.
Aby skonfigurować TB6600 z Arduino Uno, zbierz następujące elementy:
• Arduino Uno R3
• Silnik stepowy TB6600 (wersja 4A)
• Silnik krokowy (z zalecaną oceną 1,65A)
• Niezawodny zasilacz (np. Bateria lub regulowane źródło zasilania DC)
• Przewody skorupowe
• Arduino IDE zainstalowane na komputerze
Aby zintegrować TB6600 z Arduino, postępuj zgodnie z tymi szczegółowymi instrukcjami
Podłącz kierunek i sygnały impulsowe
• Połącz zaciski DIR+ i PUL+ na TB6600 z odpowiednio pinami Arduino 8 i 9.Te piny wysyłają kierunek i pulsowe sygnały.
• Przymocuj zaciski Dir- i Pul-terminale do podłoża (GND) PIN Arduino.
• Podłącz silnik do TB6600: Podłącz przewody silnika krokowego do zacisków TB6600.
• A+ i A- dla jednej cewki silnika.
• B+ i B- dla drugiej cewki.
• Zasilić sterownik TB6600: Podłącz piny VCC i GND na TB6600 do zasilania.Upewnij się, że napięcie odpowiada wymaganiom silnika i kierowcy, aby uniknąć uszkodzeń.

Dostosowanie rozdzielczości mikrostepu
TB6600 umożliwia dostosowanie precyzji ruchu silnika krokowego za pomocą przełączników SW1 i SW2.Dostosuj te przełączniki w następujący sposób:
• ¼ Rozdzielczość kroku: Ustaw SW1 na i wyłącz SW2.
• ⅛ Rozdzielczość kroku: Ustaw SW1 i SW2 ON.
• Rozdzielczość 1/32 stopnia: Ustaw zarówno SW1, jak i SW2 WYŁ.
• Tryb pełnego stopnia: Ustaw zarówno SW1, jak i SW2.
Tabela prawdy
|
SW2 |
Rozdzielczość mikrostepów |
|
WYŁĄCZONY |
1/32 krok |
|
NA |
1/8 krok |
|
WYŁĄCZONY |
1/4 krok |
|
NA |
Pełny krok |
Dostosowanie przełączników pozwalają zoptymalizować równowagę między precyzją a prędkością w oparciu o potrzeby projektu.
Aby upewnić się, że silnik działa w bezpiecznych granicach prądu, TB6600 ma dodatkowe przełączniki (SW4 i SW6) do regulacji przepływu prądu.Te ustawienia są przydatne dla:
• Zapobieganie uszkodzeniu przeciążenia.
• Utrzymanie spójnej wydajności motorycznej.
• Zawsze sprawdzaj, czy prąd silnika pozostaje poniżej maksimum 4A kierowcy w celu ochrony obu komponentów.
• Kierunek silnika sterowania: jeśli chcesz, aby silnik obrócił się w kierunku przeciwnym do ruchu wskazówek zegara, zmodyfikuj stan DIR+ PIN w kodzie Arduino.
• Testowanie i rozwiązywanie problemów: Po zakończeniu konfiguracji prześlij podstawowy szkic sterowania silnikiem krokowym, aby zweryfikować funkcję okablowania i sterownika.
• Unikaj przegrzania: Zapewnij odpowiednią wentylację kierowcy TB6600, szczególnie w aplikacjach o wysokiej prądu.
Zastosowania
Moduł TB6600 odgrywa aktywną rolę w wielu sektorach, w których stosuje się skrupulatną kontrolę silnika.Jego zdolność adaptacyjna świeci w różnych implementacjach, które podkreślają jego unikalne możliwości:
Pozycjonowanie anteny
W dziedzinie telekomunikacji osiągnięcie optymalnego wyrównania anteny jest obowiązkowe dla odbioru i transmisji sygnału wysokiej jakości.TB6600 ułatwia ruch precyzyjny, zwiększając w ten sposób skuteczność systemów komunikacyjnych.
Zarządzanie silnikiem krokowym
W ramach automatyzacji i robotyki precyzyjne obsługa silnika krokowego osiąga się za pośrednictwem TB6600, co pozwala udoskonalić precyzję ruchu i wzmocnienie niezawodności systemu.
Operacje CNC
W przypadku komputerowych maszyn do sterowania numerycznego (CNC) TB6600 poprawia skomplikowane procesy cięcia i frezowania, umożliwiając utrzymanie wysokiego poziomu dokładności i powtarzalnej precyzji w swojej pracy.
Precyzja drukowania 3D
Oprócz produkcji addytywnej, zwłaszcza drukowania 3D, TB6600 oferuje szczegółową kontrolę silnika, obsługując dokładne pozycjonowanie głowic drukowanych wymaganych do tworzenia złożonych kształtów i form.
Złożona kontrola silnika
Moduł jest cenny dla skomplikowanych zadań sterowania silnikiem w złożonych systemach automatyzacji, zwiększając wydajność i umożliwiając rafinowane zarządzanie.
Kontrola prędkości, pozycji i obrotu
TB6600 wyróżnia się w scenariuszach wymagających dokładnej prędkości i kontroli obrotowej, wykorzystywanych głównie do optymalizacji wydajności w stale zmieniających się środowiskach.
Urządzenia obrazowe i systemy bankowe
Moduł obsługuje niezawodne działanie kamer i bankomatów, zapewniając płynne, dokładne ruchy silnika, które przedłuża żywotność operacyjną urządzeń.
Precyzja w urządzeniach grawerowych
W przypadku narzędzi i maszyn grawerowania TB6600 zapewnia precyzyjną kontrolę niezbędną do wykonywania drobno szczegółowych projektów, niebezpiecznego czynnika w branżach, w których dominują precyzja i szczegóły.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Jakich zasilaczy powinienem użyć dla sterownika TB6600?
Sterownik stepowy TB6600 działa z napięciem zasilania między 8 V a 45 V.
2. Jak mogę kontrolować prędkość silnika krokowego za pomocą TB6600?
TB6600 wykorzystuje modulację szerokości impulsowej (PWM) do regulacji prędkości silnika.Możesz zmienić prędkość, modyfikując częstotliwość PWM.
3. Czy TB6600 może obsługiwać silniki wysokoprądowe?
Tak, TB6600 może obsłużyć do 4,5A, dzięki czemu jest kompatybilny z silnikami krokowymi ocenianymi do tego prądu.
4. Jak odwrócić kierunek silnika za pomocą TB6600?
Aby odwrócić kierunek silnika, przełącz sekwencję sygnału wejściowego na pinach kontrolnych (np. In1-in2-in3-in4 dla do przodu, In4-in3-in1-in1 dla do tyłu).
5. Czy mogę podłączyć silnik krokowy z więcej niż 4 przewodami do TB6600?
TB6600 jest wykonany dla 4-przewodowych silników krokowych.Jeśli Twój silnik ma więcej niż 4 przewody, potrzebujesz innego sterownika.
6. Czy TB6600 jest kompatybilny z silnikiem krokowym NEMA23?
TB6600 działa dobrze z silnikami NEMA17, ale na ogół nie nadaje się do silników NEMA23 ze względu na ich wyższe wymagania prądowe.

Kompletny przewodnik po czujniku IR regulowanym E18-D80NK
na 2024/12/12

DS3231 RTC Wyjaśniony: Schemat PIN, specyfikacje i interfejs mikrokontrolera
na 2024/12/12
Popularne posty
-

Złożone komputery zestawu instrukcji: Jak zmieniły obliczenia?
na 8000/04/18 147757
-

Pinout i funkcje USB-C
na 2000/04/18 111931
-
Korzystanie z prymitywnych symulacji XILINX: kompleksowy przewodnik po projekcie i symulacji FPGA
na 1600/04/18 111349
-

Napięcia zasilania w elektronice: znaczenie VCC, VDD, VEE, VSS i GND
na 0400/04/18 83719
-

RJ45 Podręcznik złącza: pinout, okablowanie, typy kablowe i zastosowania
na 1970/01/1 79508
-

Ostateczny przewodnik po kodach kolorów drutu w nowoczesnych systemach elektrycznych
Sposób, w jaki nasze systemy elektryczne używają kolorów, nie jest tylko dla wyglądu.Każdy kolor drutu wskazuje teraz określoną funkcję, ułatwiając poprawną identyfikację komponentów elektrycznych ...na 1970/01/1 66894
-

Jakość (Q) Współczynnik: Równania i zastosowania
Współczynnik jakości lub „Q” jest ważny podczas sprawdzania, jak dobrze induktory i rezonatory działają w systemach elektronicznych, które wykorzystują częstotliwości radiowe (RF).„Q” mierzy, jak d...na 1970/01/1 63010
-

Przewodnik zaworu oczyszczania: funkcja, objawy, testowanie i wymiana w celu optymalnej wydajności silnika
Zawór czyszczenia jest kluczową częścią systemu samochodu, który pomaga utrzymać w czystości powietrza poprzez zarządzanie oparami paliwowymi, zanim będą mogły uciec do atmosfery.To nie tylko pomag...na 1970/01/1 62996
-

Osiągnięcie wydajności szczytowej przy maksymalnym twierdzeniu o przeniesieniu mocy
Twierdzenie o maksymalnym przeniesieniu mocy wyjaśnia, w jaki sposób energia ze źródła, takiego jak akumulator lub generator, płynie do podłączonego obciążenia.Pokazuje dokładny warunek, w którym o...na 1970/01/1 54081
-

A23 Specyfikacje i kompatybilność baterii
Akumulator A23 to mała akumulator w kształcie cylindra o wysokim napięciu.Nazywany również 23a, 23E lub Mn21, działa przy 12 woltach i znacznie wyższy niż akumulatory AA lub AAA.Jego specj...na 1970/01/1 52111
Gorący numer części
-

C8051T606-ZMR
Silicon Labs
IC MCU 8BIT 1.5KB OTP 10QFN
MCF51AC256BCLKE
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 80LQFP
R5F101LCAFB#30
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 64LQFP
TSC102IPT
STMicroelectronics
IC CURR SENSE 1 CIRCUIT 8TSSOP
AD8004ARZ-14-REEL7
Analog Devices Inc.
IC OPAMP CFA 4 CIRCUIT 14SOIC
170M2109
Eaton - Bussmann Electrical Division
FUSE SQUARE 160A 1.2KV RECT
CSTLS8M00G56-B0
Murata Electronics
CERAMIC RES 8.0000MHZ 47PF T/H
PIC18F23K22-I/SP
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SPDIP
MIC5301-3.0YD5
Micrel Inc.
IC REG LINEAR 3V 150MA TSOT23-5
SPMWHT541ML5XAWMS5
Samsung Semiconductor, Inc.
LED LM561C WARM WHT 2700K 4SMD
DAC7551TDRNRQ1
Texas Instruments
IC DAC 12BIT V-OUT 12USON
WP7113GD
Kingbright
LED GREEN DIFFUSED T-1 3/4 T/H
XC7V585T-2FFG1761I
AMD
IC FPGA 850 I/O 1761FCBGA
LQW15AN51NJ00D
Murata Electronics
FIXED IND 51NH 210MA 1.08OHM SMD
NZL5V6ATT1
onsemi
TVS DIODE 3VWM 9.97V SC75 SOT416
MC100EPT20DT
onsemi
IC XLATOR TTL/CMOS-PECL 8TSSOP
C1608C0G1H080C080AA
TDK Corporation
CAP CER 8PF 50V C0G 0603
AD8674ARUZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14TSSOP -

LT6703IDC-2#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 3DFN
AD5755ACPZ
Analog Devices Inc.
IC DAC 16BIT V/A-OUT 64LFCSP
EPM7160SQC160-6
Intel
IC CPLD 160MC 6NS 160QFP
MAX158BEWI+
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT 8CH W/MUX&REF 28SOIC
SA605D/01
NXP USA Inc.
AUDIO SINGLE CHIP RECEIVER
SLG7NT4229V
Renesas Design Germany GmbH
CMIC, PWROK GENERATOR AND STARTU
170M4410
Eaton - Bussmann Electrical Division
FUSE SQUARE 315A 700VAC RECT
STTH5L06FP
STMicroelectronics
DIODE GEN PURP 600V 5A TO220FPAC
1812SC103KAT1A\SB
KYOCERA AVX
CAP CER 10000PF 1.5KV X7R 1812
HEDS-9710#R50
Broadcom Limited
ROTARY ENCODR OPTICAL 200 LPI
MAX825ZEXK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
T491C106K025AT7280
KEMET
CAP TANT 10UF 10% 25V 2312
LT1719IS6#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR TSOT23-6
VI-J54-CX
Vicor Corporation
DC DC CONVERTER 48V 75W
TPS73433TDDCRQ1
Texas Instruments
IC REG LINEAR 3.3V 250MA SOT23-5
ICL7107SCPL
Renesas Electronics America Inc
IC DISPLAY DRIVER 3.5DIGIT 40DIP
H11D2SD
onsemi
OPTOISO 5.3KV TRANS W/BASE 6SMD
ZVP2120GTA
Diodes Incorporated
MOSFET P-CH 200V 200MA SOT223 -

MAX3378EEBC+T
Analog Devices Inc./Maxim Integrated
IC TRANSLTR BIDIRECTIONAL 12UCSP
VI-812076B
Vicor Corporation
M 18/36/24 48V/ 4.17A
DAC43701DSGR
Texas Instruments
IC DAC 8BIT V-OUT 8WSON
S-80846CNUA-B87T2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT89-3
0402ZC471JAT2A
KYOCERA AVX
CAP CER 470PF 10V X7R 0402
TPS22976NDPUR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 14WSON
MTFDDAV256TBN-1AR1ZABYY
Micron Technology Inc.
SSD 256GB M.2 TLC SATA III 3.3V
FDC8886
onsemi
MOSFET N-CH 30V 6.5/8A SUPERSOT6
1812AC222JAT1A
KYOCERA AVX
CAP CER 2200PF 1KV X7R 1812
M4T32-BR12SH6
STMicroelectronics
SNAPHAT BATT/CRYSTAL FOR SOIC
SIHG47N60AEF-GE3
Vishay Siliconix
MOSFET N-CH 600V 40A TO247AC
SR295E104MARTR1
KYOCERA AVX
CAP CER 0.1UF 50V Z5U RADIAL
P6KE56CA
Littelfuse Inc.
TVS DIODE 47.8VWM 77VC DO204AC
ADP2102YCPZ-1.2-R7
Analog Devices Inc.
IC REG BUCK 1.2V 600MA 8LFCSP
IRFZ34NSTRLPBF
Infineon Technologies
MOSFET N-CH 55V 29A D2PAK
MAX5105EEP+T
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 20QSOP
ST72F623F2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 20SOIC
XRT91L80IB-F
MaxLinear, Inc.
IC TRANSCEIVER FULL 196STBGA