Wyjaśnienie modulacji szerokości impulsu (PWM).
Modulacja szerokości impulsu (PWM) to prosty i skuteczny sposób kontrolowania mocy elektrycznej za pomocą sygnałów cyfrowych.Zamiast zmieniać napięcie zasilania, dostosowujesz czas, przez jaki sygnał pozostaje włączony i wyłączony w każdym cyklu, aby kontrolować dostarczanie mocy.Ten artykuł pomoże Ci zrozumieć, jak działa PWM, jak cykl pracy wpływa na moc wyjściową i dlaczego PWM jest szeroko stosowany w elektronice i systemach sterowania.Zobaczysz także, jak PWM jest stosowane w sterownikach, typach przebiegów i aplikacjach.Katalog

Rysunek 1. Koncepcja modulacji szerokości impulsu
Co to jest modulacja szerokości impulsu?
Modulacja szerokości impulsu (PWM) to cyfrowa technika sterowania stosowana do regulowania mocy elektrycznej dostarczanej do obciążenia poprzez zmianę proporcji czasu włączenia w ustalonym okresie przełączania.Zamiast zmieniać poziom napięcia zasilania, PWM kontroluje moc efektywną poprzez szybkie przełączanie sygnału pomiędzy stanami całkowitego włączenia i całkowitego wyłączenia.Takie podejście umożliwia efektywną regulację mocy przy minimalnych stratach energii, dzięki czemu PWM jest szeroko stosowany w napędach silników, sterowaniu diodami LED, konwerterach mocy i wbudowanych systemach sterowania.
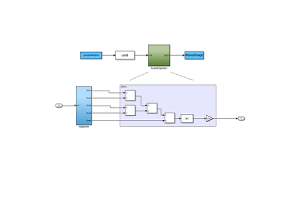
Jak działa modulacja szerokości impulsu?

Rysunek 2. Zasada działania PWM
Modulacja szerokości impulsu polega na wielokrotnym włączaniu i wyłączaniu sygnału wyjściowego przy stałej częstotliwości.Podczas każdego cyklu przełączania sygnał pozostaje włączony przez określony czas i wyłączony przez pozostałą część cyklu.Stosunek czasu włączenia do całkowitego czasu cyklu nazywany jest cyklem pracy i bezpośrednio określa średnie napięcie i prąd dostarczany do obciążenia.Wyższy cykl pracy zwiększa dostarczaną moc, podczas gdy niższy cykl pracy ją zmniejsza.
Ponieważ częstotliwość przełączania jest zwykle znacznie wyższa niż elektryczna lub mechaniczna odpowiedź obciążenia, obciążenie reaguje na średnią wartość sygnału, a nie na pojedyncze impulsy.W rezultacie PWM umożliwia płynną i precyzyjną kontrolę mocy za pomocą sygnałów cyfrowych bez konieczności stosowania źródeł napięcia zmiennego.
Charakterystyka przebiegu sygnału PWM
|
PWM
Charakterystyczne |
Opis |
|
Szerokość impulsu |
NA czas
w jednym cyklu PWM, od 0 mikrosekund do pełnego okresu. |
|
Cykl pracy |
Procent
Czas włączenia na cykl, od 0 procent do 100 procent. |
|
Częstotliwość PWM |
Liczba
cykli na sekundę, zwykle od 500 Hz do 100 kHz. |
|
Okres PWM |
Całkowity cykl
czas, zazwyczaj od 1 milisekundy do 10 mikrosekund. |
|
Sygnał
Amplituda |
Poziom napięcia
sygnału PWM, zwykle 3,3 V, 5 V lub 12 V. |
|
Wysokie napięcie
Poziom |
Napięcie
w stanie ON, równe napięciu zasilania. |
|
Niskie napięcie
Poziom |
Napięcie
w stanie WYŁĄCZONYM, typowo 0 V. |
|
Czas narastania |
Czas na
przełączać z niskiego na wysoki, często 10 ns do 1 µs. |
|
Czas jesienny |
Czas na
przełączyć z wysokiego na niski, często 10 ns do 1 µs. |
|
Przełączanie
Prędkość |
Maksymalna stawka
zmiany stanu, obsługujący PWM o wysokiej częstotliwości. |
|
Rozdzielczość |
Liczba
kroki robocze, zwykle 8-bitowe lub 10-bitowe. |
|
Sygnał
Stabilność |
Spójność
częstotliwości i cyklu pracy w czasie. |
|
Drżenie |
Mały czas
wahania, zwykle mniejsze niż 1%. |
|
Martwy czas |
Zamierzone
opóźnienie między przełączaniem, zwykle od 100 ns do 5 µs. |
|
Harmoniczne |
Wysoka częstotliwość
komponenty generowane przez szybkie przełączanie. |
|
Kontrola mocy |
Moc wyjściowa
zmienia się liniowo wraz z cyklem pracy. |
|
Załaduj odpowiedź |
Możliwość
utrzymać kształt fali przy zmianach obciążenia. |
|
Filtrowanie
Wyjście |
Filtrowane PWM
wytwarza gładkie napięcie prądu stałego. |
|
Hałas
Odporność |
Odporność na
zakłócenia poprawiają się przy czystych krawędziach. |
Rodzaje modulacji szerokości impulsu
Modulację szerokości impulsu można podzielić na różne strategie sterowania w zależności od kształtu fali wyjściowej.Te typy PWM skupiają się na koncepcjach modulacji i algorytmach sterowania, które wpływają na napięcie wyjściowe, parametry harmoniczne i wydajność.
Modulacja szerokości pojedynczego impulsu (PWM pojedynczego impulsu)

Rysunek 3. Przebieg PWM pojedynczego impulsu
Single-Pulse PWM wykorzystuje jeden impuls przełączający na połowę cyklu przebiegu wyjściowego.Szerokość tego pojedynczego impulsu jest dostosowywana w celu kontrolowania poziomu napięcia wyjściowego.Ponieważ na pół cyklu ma miejsce tylko jedno zdarzenie przełączenia, straty przełączania pozostają niskie.Jednakże ta strategia sterowania powoduje powstawanie wyższych zniekształceń harmonicznych i jest stosowana głównie w zastosowaniach związanych z niską częstotliwością i podstawowym sterowaniem mocą, gdzie prostota ma pierwszeństwo przed jakością kształtu fali.
Modulacja szerokości wielu impulsów (wielopulsowe PWM)

Rysunek 4. Wielopulsowy przebieg PWM
Multiple Pulse PWM dzieli każdy półcykl na kilka mniejszych impulsów zamiast jednego dużego impulsu.Zwiększanie liczby impulsów rozprzestrzenia energię harmoniczną w kierunku wyższych częstotliwości, poprawiając jakość przebiegu wyjściowego.Ten typ PWM zapewnia równowagę pomiędzy zmniejszonymi zniekształceniami harmonicznymi i możliwymi do opanowania stratami przełączania, dzięki czemu nadaje się do przemysłowych przetwornic mocy i systemów napędów silnikowych.
Sinusoidalna modulacja szerokości impulsu (SPWM)

Rysunek 5. Sinusoidalna generacja PWM
Sinusoidalny PWM to strategia modulacji, która generuje impulsy w oparciu o sinusoidalny sygnał odniesienia.Szerokości impulsów różnią się w zależności od chwilowej amplitudy przebiegu odniesienia, dzięki czemu po filtrowaniu sygnał wyjściowy jest zbliżony do fali sinusoidalnej.SPWM jest szeroko stosowany w falownikach, napędach silników i systemach energii odnawialnej, ponieważ zapewnia dobre parametry harmoniczne przy umiarkowanej złożoności sterowania.
Modulacja szerokości impulsu wektora przestrzennego (SVPWM)
Space Vector PWM to zaawansowana strategia sterowania, która wykorzystuje matematyczny model wektorowy falownika zamiast bezpośredniego porównania kształtu fali.Wybiera optymalne stany przełączania w celu aproksymacji obracającego się wektora odniesienia w przestrzeni napięciowej.W porównaniu do SPWM, SVPWM poprawia wykorzystanie napięcia szyny DC i dodatkowo redukuje zniekształcenia harmoniczne, dzięki czemu nadaje się do wysokowydajnych napędów silnikowych i precyzyjnych przemysłowych systemów sterowania.
Metody generowania PWM
Sygnały PWM można również kategoryzować według sposobu generowania impulsów i dopasowywania sprzętowego.Te metody generowania PWM skupiają się na działaniu timera, symetrii przełączania i rozmieszczeniu impulsów, a nie na samej strategii modulacji.
Single Edge PWM (PWM wyrównany do krawędzi)

Rysunek 6. Synchronizacja PWM z krawędziami
Single Edge PWM wyrównuje wszystkie impulsy do jednej krawędzi okresu przełączania, zazwyczaj do zbocza narastającego.Cykl pracy reguluje się poprzez wydłużenie lub skrócenie impulsu od tej stałej krawędzi.Ta metoda generowania jest prosta do wdrożenia przy użyciu sprzętowych liczników czasu i komparatorów, ale jej asymetryczny wzór przełączania może zwiększać zniekształcenia harmoniczne i zakłócenia elektromagnetyczne.
Dwukrawędziowy PWM (wyrównany centralnie PWM)

Rysunek 7. Wyśrodkowane taktowanie PWM
Double-Edge PWM centruje impuls w okresie przełączania, włączając i wyłączając symetrycznie wokół punktu środkowego.To symetryczne taktowanie zmniejsza zniekształcenia harmoniczne i zakłócenia elektromagnetyczne, poprawiając jednocześnie równowagę prądu.Ze względu na te zalety, centralnie ustawione PWM jest powszechnie stosowane w precyzyjnych napędach silników i wysokowydajnych zastosowaniach sterowania mocą.
PWM oparty na nośnej (komparator PWM)
Carrier-Based PWM generuje impulsy poprzez porównanie sygnału odniesienia z przebiegiem nośnym o wysokiej częstotliwości za pomocą komparatora.Gdy wartość zadana przekracza nośną, wyjście włącza się.Metoda ta służy jako podstawa generowania sprzętu dla wielu strategii sterowania PWM, w tym SPWM, i jest szeroko stosowana w mikrokontrolerach, procesorach DSP i sterownikach przemysłowych.
PWM w mikrokontrolerach i kontrolerach
Modulacja szerokości impulsu w Arduino

Rysunek 8. Sterowanie diodami LED Arduino PWM
Arduino generuje modulację szerokości impulsu za pomocą wewnętrznych timerów sprzętowych, które przełączają pin wyjściowy między stanami WYSOKIM i NISKIM.Cykl pracy jest regulowany za pomocą oprogramowania, które bezpośrednio kontroluje średnie napięcie dostarczane do obciążenia.Zmieniając cykl pracy, Arduino może płynnie zmieniać jasność diod LED lub prędkość silnika bez zmiany napięcia zasilania.Częstotliwość PWM jest zwykle ustalana przez ustawienia timera, zapewniając stabilną pracę podczas zadań kontrolnych.Jak pokazano na rysunku, pin Arduino PWM steruje diodą LED przez rezystor, wyraźnie pokazując, jak zmiana cyklu pracy zmienia widoczną jasność.
Modulacja szerokości impulsu w ESP32

Rysunek 9. Przykład wyjścia PWM ESP32
ESP32 zapewnia zaawansowaną modulację szerokości impulsu przy użyciu dedykowanych modułów sprzętowych PWM.Obsługuje wyższą rozdzielczość, wiele niezależnych kanałów PWM i elastyczną kontrolę częstotliwości bez obciążania procesora.Umożliwia to precyzyjną i responsywną kontrolę mocy silników, diod LED i urządzeń IoT.ESP32 PWM jest szczególnie odpowiedni do zastosowań wymagających szybkiej reakcji i dokładnej regulacji mocy wyjściowej.Rysunek 9 przedstawia ESP32 sterujący wieloma diodami LED o różnych cyklach pracy PWM, ilustrując, w jaki sposób każdy kanał niezależnie reguluje moc wyjściową.
Modulacja szerokości impulsu w sterownikach PLC

Rysunek 10. Sterowanie grzejnikiem PLC PWM
Sterowniki PLC wykorzystują modulację szerokości impulsu do sterowania obciążeniami przemysłowymi, takimi jak grzejniki, silniki i siłowniki, z wysoką niezawodnością.Wyjście PWM jest regulowane w oparciu o informację zwrotną z czujnika lub zaprogramowaną logikę sterowania w celu dokładnej regulacji mocy.Metoda ta umożliwia płynną kontrolę przy jednoczesnej minimalizacji naprężeń elektrycznych w urządzeniach przełączających.PWM oparty na sterowniku PLC został zaprojektowany do niezawodnej pracy w hałaśliwych elektrycznie i trudnych środowiskach przemysłowych.Jak pokazano na rysunku, sterownik PLC wykorzystuje sygnał PWM do sterowania przekaźnikiem półprzewodnikowym, który steruje mocą grzejnika w oparciu o sprzężenie zwrotne temperatury.
Zastosowania modulacji szerokości impulsu
Modulacja szerokości impulsu jest szeroko stosowana do wydajnego i precyzyjnego sterowania mocą zarówno w zastosowaniach elektronicznych o małej, jak i dużej mocy.
1. Sterowanie prędkością silnika
PWM jest powszechnie stosowany w silnikach prądu stałego, serwomotorach i napędach silników BLDC do sterowania prędkością i momentem obrotowym poprzez zmianę średniego napięcia dostarczanego do silnika.Metoda ta zapewnia płynną kontrolę prędkości i wysoką wydajność w robotyce, automatyce przemysłowej i pojazdach elektrycznych.
2. Sterowanie przyciemnianiem i oświetleniem LED
W sterownikach LED PWM kontroluje jasność poprzez szybkie włączanie i wyłączanie diody LED przy jednoczesnym utrzymywaniu stałego poziomu prądu.Zapobiega to zmianie kolorów, poprawia wydajność i umożliwia precyzyjną regulację jasności wyświetlaczy, oświetlenia samochodowego i inteligentnych systemów oświetleniowych.
3. Zasilacze i regulacja napięcia
PWM to podstawowa technika stosowana w zasilaczach impulsowych, przetwornikach DC-DC i falownikach.Pomaga skutecznie regulować napięcie wyjściowe i prąd, redukując wytwarzanie ciepła w porównaniu do regulatorów liniowych.
4. Generowanie sygnału audio
PWM jest używany we wzmacniaczach audio klasy D do konwersji sygnałów audio na sygnały przełączające o wysokiej częstotliwości.Umożliwia to wzmocnienie dźwięku o dużej mocy przy niskich stratach mocy i kompaktowej konstrukcji obwodu.
5. Ogrzewanie i kontrola temperatury
PWM steruje mocą dostarczaną do grzejników, elementów grzejnych i systemów kontroli temperatury, dostosowując czas włączenia i wyłączenia zasilania.Zapewnia to stabilną regulację temperatury w grzejnikach przemysłowych, stacjach lutowniczych i sprzęcie AGD.
6. Ładowanie baterii i zarządzanie energią
PWM jest stosowany w ładowarkach akumulatorów i kontrolerach ładowania słonecznego w celu zarządzania prądem i napięciem ładowania.Poprawia to wydajność ładowania, chroni akumulatory przed przeładowaniem i wydłuża ich żywotność.
7. Mikrokontroler i systemy wbudowane
Wyjścia PWM z mikrokontrolerów są szeroko stosowane do generowania sygnałów analogowych, sterowania elementami wykonawczymi i łączenia się z urządzeniami zewnętrznymi.To sprawia, że PWM jest ważny w systemach wbudowanych, urządzeniach IoT i aplikacjach sterujących.
PWM a sterowanie liniowe a sterowanie kątem fazowym
|
Parametr |
PWM
Kontrola |
Liniowy
Kontrola |
Faza
Kontrola kąta |
|
Podstawowa kontrola
Metoda
|
Wyjście jest
kontrolowane przez zmienny cykl pracy |
Wyjście jest
kontrolowane poprzez liniowe obniżanie napięcia |
Wyjście jest
kontrolowane poprzez opóźnienie przewodzenia fali prądu przemiennego |
|
Typowe zaopatrzenie
Wpisz |
Zasilanie prądem stałym
dostawa |
Zasilanie prądem stałym
dostawa |
Zasilanie sieciowe
dostawa |
|
Sygnał kontrolny
Częstotliwość |
Powszechnie 1
kHz do 100 kHz |
Zero
częstotliwość przełączania |
Linia
częstotliwość 50 Hz lub 60 Hz |
|
Efektywność energetyczna |
Wydajność
zazwyczaj od 85 do 98 procent |
Wydajność
zazwyczaj od 30 do 60 procent |
Wydajność
zazwyczaj od 70 do 90 procent |
|
Wytwarzanie ciepła |
Strata ciepła jest
niski ze względu na operację przełączania |
Strata ciepła jest
wysoki ze względu na spadek napięcia |
Strata ciepła jest
umiarkowane podczas częściowego przewodzenia |
|
Napięcie wyjściowe
Rozporządzenie |
Średnia
napięcie jest kontrolowane przez cykl pracy |
Wyjście
napięcie następuje bezpośrednio po wejściu sterującym |
Napięcie skuteczne
zmienia się w zależności od kąta zapłonu |
|
Rozdzielczość kontrolna |
Wysoka
rozdzielczość z zegarami cyfrowymi |
Bardzo wysoki
rozdzielczość ze sterowaniem analogowym |
Średni
rozdzielczość ograniczona kształtem fali prądu przemiennego |
|
Złożoność obwodu |
Średni
złożoność elementów przełączających |
Proste
obwód z elementem przejściowym |
Średni
złożoność przy użyciu TRIAC lub SCR |
|
EMI i hałas
Poziom |
EMI jest
od umiarkowanego do wysokiego, bez filtrowania |
EMI jest bardzo
niski |
EMI jest wysokie
z powodu zniekształcenia kształtu fali |
|
Typowe przełączanie
Urządzenie |
MOSFET lub
IGBT |
BJT lub liniowy
regulator |
TRIAK lub SCR |
|
Szybkość reakcji |
Czas reakcji
jest w mikrosekundach |
Czas reakcji
jest w milisekundach |
Czas reakcji
zależy od przejścia przez zero AC |
|
Kompatybilność obciążenia |
Najlepsze dla
diody LED silników i konwertery mocy |
Najlepiej na niskim
zasilanie obciążeń analogowych |
Najlepsze dla
lampy, grzejniki i silniki prądu przemiennego |
|
Zakres mocy znamionowej |
Od 1 wata
do kilku kilowatów |
Zwykle poniżej
50 watów |
Powszechnie od
100 watów do kilku kilowatów |
|
Dokładność kontroli |
Dokładność
zależy od rozdzielczości timera |
Bardzo dokładne
i płynna kontrola |
Dokładność
pod wpływem zmian napięcia sieciowego |
|
Typowe zastosowania |
Prędkość silnika
sterować przyciemnianiem diod LED SMPS |
Dźwięk
wzmacniacze obwodów czujników |
Ściemniacze światła
regulatory wentylatorów sterowanie nagrzewnicą |
Wniosek
Modulacja szerokości impulsu zapewnia wydajną i dokładną kontrolę mocy poprzez zmianę współczynnika wypełnienia sygnału przełączającego.Różne typy PWM i metody generowania wpływają na jakość przebiegu, wydajność i wydajność systemu.PWM jest szeroko stosowany w mikrokontrolerach, sterownikach PLC i elektronice mocy do silników, oświetlenia, konwersji mocy i kontroli temperatury.Jego prostota i wydajność sprawiają, że jest niezbędny w nowoczesnych zastosowaniach elektronicznych.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Czy PWM może uszkodzić silniki lub diody LED, jeśli zostanie użyty nieprawidłowo?
Tak, nieprawidłowe ustawienia PWM, takie jak bardzo wysoka częstotliwość, słabe filtrowanie lub nieprawidłowy wybór sterownika, mogą powodować przegrzanie, hałas lub skrócenie żywotności.Używanie prawidłowej częstotliwości PWM i odpowiednich obwodów sterownika zapobiega uszkodzeniom.
2. Jaka częstotliwość PWM jest najlepsza dla silników, diod LED i grzejników?
Silniki zazwyczaj wykorzystują częstotliwości PWM od 1 kHz do 20 kHz, diody LED często używają częstotliwości od 500 Hz do 5 kHz, a grzejniki mogą wykorzystywać bardzo niskie częstotliwości, takie jak 1 Hz do 100 Hz.Idealna częstotliwość zależy od rodzaju obciążenia i zastosowania.
3. Czy potrzebuję filtra, jeśli używam PWM dla sygnałów analogowych?
Tak, filtr dolnoprzepustowy jest zalecany, gdy PWM jest używany do generowania napięć analogowych.Filtrowanie wygładza przebieg PWM i redukuje tętnienia, dzięki czemu nadaje się do wrażliwych obwodów.
4. Jakie elementy są potrzebne do zbudowania obwodu sterującego PWM?
Podstawowy system PWM wymaga kontrolera, urządzenia przełączającego, obwodu sterownika, zasilacza i obciążenia.W zależności od poziomu mocy mogą być potrzebne dodatkowe komponenty, takie jak filtry, obwody zabezpieczające i radiatory.
5. Czy PWM powoduje powstawanie szumów lub zakłóceń elektrycznych?
Przełączanie PWM może generować zakłócenia elektromagnetyczne, jeśli nie jest odpowiednio zaprojektowane.Stosowanie ekranowania, filtrowania, odpowiedniego uziemienia i prawidłowej częstotliwości przełączania pomaga zmniejszyć problemy z hałasem.

Przegląd techniczny podwójnego wzmacniacza operacyjnego AD8542AR
na 2026/01/13

Zalety i wady trójfazowych połączeń transformatorowych
na 2026/01/12
Popularne posty
-

Złożone komputery zestawu instrukcji: Jak zmieniły obliczenia?
na 8000/04/18 147758
-

Pinout i funkcje USB-C
na 2000/04/18 111940
-
Korzystanie z prymitywnych symulacji XILINX: kompleksowy przewodnik po projekcie i symulacji FPGA
na 1600/04/18 111349
-

Napięcia zasilania w elektronice: znaczenie VCC, VDD, VEE, VSS i GND
na 0400/04/18 83721
-

RJ45 Podręcznik złącza: pinout, okablowanie, typy kablowe i zastosowania
na 1970/01/1 79508
-

Ostateczny przewodnik po kodach kolorów drutu w nowoczesnych systemach elektrycznych
Sposób, w jaki nasze systemy elektryczne używają kolorów, nie jest tylko dla wyglądu.Każdy kolor drutu wskazuje teraz określoną funkcję, ułatwiając poprawną identyfikację komponentów elektrycznych ...na 1970/01/1 66914
-

Przewodnik zaworu oczyszczania: funkcja, objawy, testowanie i wymiana w celu optymalnej wydajności silnika
Zawór czyszczenia jest kluczową częścią systemu samochodu, który pomaga utrzymać w czystości powietrza poprzez zarządzanie oparami paliwowymi, zanim będą mogły uciec do atmosfery.To nie tylko pomag...na 1970/01/1 63064
-

Jakość (Q) Współczynnik: Równania i zastosowania
Współczynnik jakości lub „Q” jest ważny podczas sprawdzania, jak dobrze induktory i rezonatory działają w systemach elektronicznych, które wykorzystują częstotliwości radiowe (RF).„Q” mierzy, jak d...na 1970/01/1 63012
-

Osiągnięcie wydajności szczytowej przy maksymalnym twierdzeniu o przeniesieniu mocy
Twierdzenie o maksymalnym przeniesieniu mocy wyjaśnia, w jaki sposób energia ze źródła, takiego jak akumulator lub generator, płynie do podłączonego obciążenia.Pokazuje dokładny warunek, w którym o...na 1970/01/1 54081
-

A23 Specyfikacje i kompatybilność baterii
Akumulator A23 to mała akumulator w kształcie cylindra o wysokim napięciu.Nazywany również 23a, 23E lub Mn21, działa przy 12 woltach i znacznie wyższy niż akumulatory AA lub AAA.Jego specj...na 1970/01/1 52134
Gorący numer części
-

RLD03N06CLESM
Harris Corporation
N-CHANNEL POWER MOSFET
MAX4619EUE
Analog Devices Inc./Maxim Integrated
IC SWITCH SPDT X 3 10OHM 16TSSOP
MSP430F5325IPN
Texas Instruments
IC MCU 16BIT 64KB FLASH 80LQFP
SI7113ADN-T1-GE3
Vishay Siliconix
MOSFET P-CH 100V 10.8A PPAK
TMS320F28379SZWTT
Texas Instruments
IC MCU 32BIT 1MB FLASH 337NFBGA
MMBF4393LT1G
onsemi
JFET N-CH 30V SOT23-3
NOJE337M006RWJ
KYOCERA AVX
CAP NIOB OXI 330UF 20% 6.3V 2917
PBSS5350X,135
Nexperia USA Inc.
TRANS PNP 50V 3A SOT89
CL10C5R1CB8NNNC
Samsung Electro-Mechanics
CAP CER 5.1PF 50V C0G/NP0 0603
FDS6680
onsemi
MOSFET N-CH 30V 11.5A 8SOIC
74HC164D14
Diodes Incorporated
IC SHIFT REGISTER SER 14DIP
HMC438MS8GE
Analog Devices Inc.
IC FREQ DIVIDER DC-7GHZ 8MSOP
FT24C64A-ELR-T
Fremont Micro Devices Ltd
IC EEPROM 64KBIT I2C SOT23-5
0805YA120JAT2A
KYOCERA AVX
CAP CER 12PF 16V NP0 0805
ONET1191PRGTT
Texas Instruments
IC LIMITING AMP 16QFN
ELM3043(TA)
Everlight Electronics Co Ltd
OPTOISOLATOR 3.75KV TRIAC 4SMD
JANTX1N6466
Microchip Technology
TVS DIODE 30.5VWM 47.5VC AXIAL
TNY264PG
Power Integrations
IC OFFLINE SWITCH FLYBACK 8DIP -

MPC857DSLZQ50B
Freescale Semiconductor
POWERQUICC RISC MICROPROCESSOR
ONET8501VRGPT
Texas Instruments
IC LASER DRVR 11.3GB 3.6V 20QFN
MAX7443ESA+T
Analog Devices Inc./Maxim Integrated
IC FILTER 27MHZ LOW PASS 8SOIC
PM5422D-FGI
Microchip Technology
IC ETHERNET PCI META 20G
LTC4380IMS-4#PBF
Analog Devices Inc.
IC LOW CUR SURGE STOPPER 10MSOP
V300B24T250B
Vicor Corporation
DC DC CONVERTER 24V 250W
LM3743MM-1000
Texas Instruments
IC REG CTRLR BUCK 10MSOP
EP3SL150F1152C2N
Intel
IC FPGA 744 I/O 1152FBGA
GRM0336S1E3R6CD01D
Murata Electronics
CAP CER 3.6PF 25V S2H 0201
STPS3H100AF
STMicroelectronics
DIODE SCHOTT 100V 3A SOD128FLAT
ATMEGA2560V-8AU
Atmel
IC MCU 8BIT 256KB FLASH 100TQFP
SMBJ12A
Meritek
TVS DIODE 12VWM 19.9VC
FAN7314AMX
onsemi
IC INVERTER DVR LCD BKLT 20SOIC
SMAJ51-E3/61
Vishay General Semiconductor - Diodes Division
TVS DIODE 51VWM 91.1VC DO214AC
WW12XR430FTL
Walsin Technology Corporation
RES 0.43 OHM 1% 1/4W 1206
LM77CIMMX-3
Texas Instruments
SENSOR DIGITAL -55C-125C 8VSSOP
MAX3645EEE+T
Analog Devices Inc./Maxim Integrated
IC LIMITING AMP 16QSOP
R5F104BCAFP#10
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 32LQFP -

DAC8420ESZ
Analog Devices Inc.
IC DAC 12BIT V-OUT 16SOIC
AU1PGHM3/84A
Vishay General Semiconductor - Diodes Division
DIODE AVALANCHE 400V 1A DO220AA
SI8661ED-B-ISR
Skyworks Solutions Inc.
DGTL ISO 5000VRMS 6CH GP 16SOIC
CL05F103ZB5NNNC
Samsung Electro-Mechanics
CAP CER 10000PF 50V Y5V 0402
OPA2237EA/2K5
Texas Instruments
IC OPAMP GP 2 CIRCUIT 8VSSOP
QMK212B7222KDHT
Taiyo Yuden
CAP CER 2200PF 250V X7R 0805
PIC12F508-I/MS
Microchip Technology
IC MCU 8BIT 768B FLASH 8MSOP
ZXTN19100CFFTA
Diodes Incorporated
TRANS NPN 100V 4.5A SOT23F
TSOP57338TT1
Vishay Semiconductor Opto Division
SENSOR REMOTE REC 38.0KHZ 40M
12067A101MAT2A
KYOCERA AVX
CAP CER 100PF 500V NP0 1206
SN75154DR
Texas Instruments
IC RECEIVER 0/4 16SOIC
L6385D013TR
STMicroelectronics
IC GATE DRVR HALF-BRIDGE 8SO
MMBT2907AQ-7-F
Diodes Incorporated
GENERAL PURPOSE TRANSISTOR SOT23
DDTC114TCA-7
Diodes Incorporated
TRANS PREBIAS NPN 200MW SOT23-3
TPS3307-33DGNR
Texas Instruments
IC SUPERVISOR 3 CHANNEL 8MSOP
SP232ECN-L
MaxLinear, Inc.
IC TRANSCEIVER FULL 2/2 16SOIC
ADUC7039BCP6Z-RL
Analog Devices Inc.
IC MCU 16/32B 64KB FLASH 32LFCSP
LTC3630EMSE#TRPBF
Analog Devices Inc.
IC REG BCK ADJ/PROG 500MA 16MSOP