Wprowadzenie do systemów sterowania: działanie, rodzaje i zastosowania
Systemów sterowania używasz zawsze wtedy, gdy maszyna automatycznie utrzymuje stałą wartość, taką jak temperatura, prędkość lub poziom.W tym artykule wyjaśniono, czym jest system sterowania, jak współpracują ze sobą jego części i w jaki sposób sprzężenie zwrotne utrzymuje prawidłowe wyniki.Zobaczysz także główne typy systemów i ich zachowanie podczas pracy.Uwzględniono typowe zastosowania, korzyści i ograniczenia.Katalog

Rysunek 1. Przykład układu sterowania
Co to jest system kontroli?
System sterowania to system, który utrzymuje zmierzoną wartość blisko pożądanej wartości docelowej.Jego celem jest automatyczne dostosowanie procesu, tak aby wynik pozostawał prawidłowy nawet w przypadku zmiany warunków.Na przykład termostat pokojowy utrzymuje temperaturę w pobliżu ustawionego poziomu, a tempomat samochodowy utrzymuje wybraną prędkość pojazdu.Kontroler poziomu wody w zbiorniku utrzymuje również wysokość wody na wybranym poziomie.Krótko mówiąc, system sterowania stale sprawdza i koryguje zmienną, aby odpowiadała wymaganej wartości.
Podstawowe elementy systemu sterowania

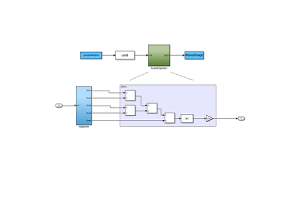
Rysunek 2. Schemat blokowy układu sterowania
System sterowania składa się z kilku standardowych części, z których każda wykonuje określone zadanie.
• Wejście odniesienia (wartość zadana)
Jest to pożądana wartość, którą system stara się utrzymać.Reprezentuje wybrany warunek docelowy.System zawsze porównuje wartość rzeczywistą z wartością odniesienia.
• Sygnał uruchamiający
Jest to sygnał powstający po porównaniu wartości żądanej i rzeczywistej.Wskazuje, ile regulacji jest potrzebne.Sygnał przygotowuje system do korekty.
• Elementy sterujące
Części te obsługują proces podejmowania decyzji.Określają działania naprawcze na podstawie otrzymanego sygnału.Wyniki tego etapu przygotowują proces do dostosowania.
• Manipulowana zmienna
Jest to regulowana ilość wysyłana do procesu.Zmiana tej wartości ma wpływ na ostateczną moc wyjściową.Jest to zmienna, którą system może bezpośrednio zmieniać.
• Roślina
Instalacja jest procesem kontrolowanym.Generuje ostateczną wartość wyjściową.Celem systemu jest utrzymanie tej mocy wyjściowej na pożądanym poziomie.
• Zakłócenie
Jest to niepożądana zmiana wpływająca na proces.Może odsunąć sygnał wyjściowy od żądanej wartości.System musi to kompensować.
• Kontrolowana zmienna (wyjście)
Jest to rzeczywisty zmierzony wynik procesu.Pokazuje obecny stan systemu.Celem jest utrzymanie go na poziomie wejścia referencyjnego.
• Elementy opinii
Mierzą one dane wyjściowe i przesyłają informacje z powrotem do sprawdzenia.Dostarczają systemowi aktualnego stanu.Pozwala to na określenie korekty.
• Sygnał zwrotny
Jest to zwrócona informacja o wartości wyjściowej.Reprezentuje stan procesu.System wykorzystuje to do porównania.
Zasada działania układu sterowania

Rysunek 3. Zasada działania układu sterowania
Zasada działania systemu sterowania rozpoczyna się od podania do systemu pożądanej wartości wejściowej.Następnie system porównuje tę wartość z rzeczywistą wartością wyjściową.Różnica między nimi nazywana jest sygnałem błędu.Jeżeli błąd występuje, system generuje sygnał korygujący.Ta korekta dostosowuje proces w celu zmniejszenia błędu.Sygnał wyjściowy zmienia się i jest ponownie sprawdzany w sposób ciągły.Cykl powtarza się, aż sygnał wyjściowy będzie ściśle odpowiadał żądanej wartości.
Charakterystyka systemów sterowania
Systemy sterowania są oceniane na podstawie tego, jak dobrze działają podczas pracy.Cechy te opisują jakość i niezawodność reakcji systemu.
|
Charakterystyka |
Opis |
|
Stabilność |
Wyjście tak
nie różnią się;powraca do wartości stałej po zakłóceniu |
|
Dokładność |
Błąd końcowy ≤
±2–5% ustawionej wartości |
|
Precyzja |
Wyjście
odchylenie ≤ ±1% przy tym samym wejściu |
|
Czas reakcji
|
Początkowe
reakcja następuje w zmierzonym czasie opóźnienia (td) |
|
Czas narastania |
Czas od 10%
do 90% wartości końcowej |
|
Czas rozstrzygania |
Wchodzi i
pozostaje w zakresie ±2%. |
|
Przekroczenie |
Szczyt przekracza
wartość końcowa w % kwoty |
|
Stan ustalony
Błąd |
Stała
przesunięcie pozostałe po stabilizacji |
|
Czułość |
ΔWyjście /
ΔStosunek zmiany parametrów |
|
Solidność |
Utrzymuje
działanie pomimo zmiany zakłócenia |
|
Przepustowość |
Działa
efektywnie do -3 dB częstotliwości odcięcia |
|
Powtarzalność |
To samo wejście
daje taką samą moc wyjściową w granicach tolerancji |
|
Niezawodność |
Działa
bezawaryjny przez znamionowy czas pracy (MTBF) |
|
Tłumienie |
Oscylacja
zanik określony przez współczynnik tłumienia ζ |
|
Prędkość
Odpowiedź |
Całkowity czas do
osiągnąć stan stabilny |
Rodzaje systemów sterowania
Systemy sterowania są klasyfikowane na podstawie sposobu, w jaki radzą sobie z informacjami, sygnałami i zachowaniem w odpowiedzi.Są one pogrupowane według wykorzystania sprzężenia zwrotnego, formy sygnału i zachowania matematycznego.
System sterowania w otwartej pętli

Rysunek 4. Schemat systemu sterowania w otwartej pętli
System sterowania w pętli otwartej to system, w którym sygnał wyjściowy nie wpływa na działanie sterujące.System wysyła polecenie i zakłada, że wynik jest prawidłowy, bez sprawdzania go.Ponieważ nie ma ścieżki sprzężenia zwrotnego, nie może ona automatycznie korygować błędów ani zakłóceń.Wydajność zależy głównie od właściwej kalibracji i warunków pracy.Systemy te są proste, tanie i łatwe w projektowaniu.Jednak zmiany obciążenia lub środowiska mogą mieć wpływ na wynik końcowy.Typowe przykłady obejmują timer tostera elektrycznego, timer pralki i stały timer nawadniania.
System sterowania w pętli zamkniętej

Rysunek 5. Schemat systemu sterowania w pętli zamkniętej
System sterowania w pętli zamkniętej to system wykorzystujący sprzężenie zwrotne do automatycznej regulacji mocy wyjściowej.System mierzy wynik i porównuje go z żądaną wartością.Jeśli pojawi się różnica, stosowana jest korekta w celu zmniejszenia błędu.Ta ciągła regulacja umożliwia dokładną i stabilną pracę nawet w zmiennych warunkach.Systemy z pętlą zamkniętą zapewniają lepszą precyzję i niezawodność niż systemy z pętlą otwartą.Są szeroko stosowane w nowoczesnych zastosowaniach automatycznego sterowania.Typowe przykłady obejmują kontrolę temperatury klimatyzatora, tempomat pojazdu i automatyczne regulatory napięcia.
System kontroli ciągłego czasu

Rysunek 6. Sygnał sterujący ciągły (analogowy).
System sterowania w czasie ciągłym przetwarza sygnały, które płynnie zmieniają się w czasie.Wejście i wyjście istnieją w każdej chwili, bez przerwy.Systemy te zwykle działają z analogowymi sygnałami elektrycznymi lub mechanicznymi.Ponieważ sygnały są ciągłe, reakcja jest również płynna i naturalna.Systemy pracy ciągłej są powszechnie spotykane w tradycyjnych sterownikach analogowych.Nadają się do procesów fizycznych wymagających natychmiastowej reakcji.Przykłady obejmują analogowe regulatory prędkości, sterowanie głośnością wzmacniacza audio i sterowanie położeniem zaworów hydraulicznych.
System sterowania w czasie dyskretnym

Rysunek 7. Sygnał sterujący dyskretny (cyfrowy).
System sterowania w czasie dyskretnym wykorzystuje próbkowane sygnały danych.System sprawdza i aktualizuje wartości tylko w określonych odstępach czasu.Sygnały te są zwykle przetwarzane przez sterowniki cyfrowe lub mikroprocesory.Dane wyjściowe zmieniają się krok po kroku, a nie w sposób ciągły.Takie systemy umożliwiają programowalne działanie i elastyczną regulację.Znajdują szerokie zastosowanie w nowoczesnym sterowaniu elektronicznym i komputerowym.Przykłady obejmują kontrolę temperatury opartą na mikrokontrolerze, cyfrową kontrolę prędkości silnika i inteligentne termostaty domowe.
Liniowy system sterowania

Rysunek 8. Zależność wejście-wyjście systemu liniowego
Liniowy system sterowania opiera się na proporcjonalnej zależności pomiędzy wejściem i wyjściem.Jeśli nakłady się podwoją, produkcja również się podwoi w tych samych warunkach.Systemy te spełniają zasadę superpozycji, w której połączone dane wejściowe dają połączone wyniki.Zachowanie liniowe umożliwia przewidywalną i łatwą analizę matematyczną.Większość teoretycznych projektów sterowania zakłada dla uproszczenia działanie liniowe.Modele liniowe pomagają w projektowaniu stabilnych i dokładnych systemów.Przykładami są małosygnałowe wzmacniacze elektroniczne i obszary sterowania silnikami o niskim obciążeniu.
Nieliniowy układ sterowania

Rysunek 9. Nieliniowa charakterystyka odpowiedzi systemu
Nieliniowy układ sterowania ma sygnał wyjściowy, który nie jest proporcjonalny do sygnału wejściowego.Reakcja zmienia się w zależności od zakresu działania i warunków.Małe zmiany wejściowe mogą powodować duże zmiany wyjściowe lub nie powodować żadnych zmian.Często pojawiają się efekty takie jak nasycenie, histereza i martwe strefy.Systemy te są trudniejsze do analizy, ale dokładniej odzwierciedlają procesy fizyczne.Wiele systemów w naturalny sposób zachowuje się w sposób nieliniowy.Przykłady obejmują ograniczenia ruchu ramienia robota, zachowanie siłownika magnetycznego i sterowanie przepływem zaworu w skrajnych pozycjach.
Zalety i wady systemów sterowania
Systemy sterowania poprawiają spójność i zmniejszają wysiłek ręczny, ale także wprowadzają złożoność i koszty.
Zalety systemów sterowania
• System utrzymuje moc wyjściową w pobliżu wymaganej wartości podczas pracy.
• Operatorzy nie muszą ręcznie regulować sprzętu.
• Maszyny mogą pracować przez długie godziny bez częstych zatrzymań.
• System automatycznie koryguje zmiany warunków.
• Stan działania można sprawdzić na panelu lub na zdalnym wyświetlaczu.
Wady systemów sterowania
• Koszt instalacji jest wyższy niż w przypadku prostych systemów ręcznych.
• Do konfiguracji i serwisu potrzebni są wykwalifikowani pracownicy.
• Czujniki i części elektroniczne mogą z czasem ulec uszkodzeniu.
• Znalezienie przyczyny problemów może zająć więcej czasu.
• System zależy od stabilnej energii elektrycznej.
Zastosowania systemów sterowania
Układy sterowania stosowane są zarówno w automatyce przemysłowej, jak i urządzeniach codziennego użytku, w celu automatycznego utrzymania prawidłowej pracy.
1. Produkcja przemysłowa
Maszyny produkcyjne utrzymują stałe wymiary i jakość produktu.Zautomatyzowane linie montażowe korzystają z regulacji zapewniających powtarzalność.Zmniejsza to ilość odpadów i poprawia wydajność.
2. Regulacja temperatury
Urządzenia grzewcze i chłodnicze utrzymują komfortowe warunki środowiskowe.Budynki korzystają z automatycznej regulacji, aby ustabilizować klimat w pomieszczeniach.Poprawia to efektywność energetyczną i komfort.
3. Systemy transportowe
Pojazdy korzystają z kontroli prędkości i stabilności, aby zapewnić płynniejszą pracę.Nowoczesne samochody wyposażone są w tempomat i systemy trakcyjne.Poprawiają one bezpieczeństwo i wydajność jazdy.
4. Systemy zasilania
Sieci elektryczne regulują poziomy napięcia i częstotliwości.Generatory dostosowują moc wyjściową do zapotrzebowania na obciążenie.Zapewnia to stabilne dostawy energii elektrycznej.
5. Robotyka i automatyzacja
Roboty wykonują dokładne zadania związane z pozycjonowaniem i ruchem.Zautomatyzowane maszyny działają w sposób ciągły z dużą precyzją.Umożliwia to zaawansowaną produkcję.
6. Sprzęt medyczny
Urządzenia utrzymują kontrolowane warunki pracy podczas zabiegu.Sprzęt monitorujący utrzymuje wartości w bezpiecznych granicach.Poprawia to bezpieczeństwo i niezawodność pacjenta.
7. Sprzęt AGD
Urządzenia codziennego użytku automatycznie zarządzają ustawieniami działania.Pralki i lodówki utrzymują odpowiednie warunki pracy.Upraszcza to codzienne zadania.
8. Systemy lotnicze
Samoloty i drony utrzymują stabilne warunki lotu.Automatyczne prowadzenie utrzymuje prawidłową orientację i wysokość.Wspiera to niezawodną nawigację.
System sterowania a automatyka vs systemy wbudowane
Technologie te są ze sobą ściśle powiązane, ale służą różnym celom inżynieryjnym w nowoczesnych produktach elektronicznych i przemysłowych.
|
Funkcja |
Kontrola
Systemu |
Automatyzacja |
Wbudowany
Systemu |
|
Główny nacisk |
Rozporządzenie z
zmienne |
Proces
wykonanie |
Urządzenie
operacja |
|
Cel |
Utrzymuj
pożądana wartość |
Wykonuj zadania
automatycznie |
Uruchom dedykowany
funkcje |
|
Zakres |
Konkretny
zachowanie procesowe |
Całość
przepływ pracy
|
Pojedynczy
urządzenie produktowe |
|
Decyzja
Możliwości |
Na podstawie
zmierzone wartości |
Na podstawie
zaprogramowana logika |
Na podstawie
oprogramowanie sprzętowe |
|
Użyj opinii |
Często
wymagane |
Opcjonalne |
Opcjonalne |
|
Typ sprzętu |
Czujniki i
siłowniki |
Maszyny i
kontrolery |
Mikrokontroler
deska |
|
Rola oprogramowania |
Obliczenia
i korekta |
Sekwencjonowanie
i koordynacja |
Urządzenie
logika sterowania |
|
Typ odpowiedzi |
Ciągłe
regulacja |
Zadanie
wykonanie |
Funkcjonalne działanie |
|
Rozmiar systemu |
Mały do
średni |
Średnio do
duży |
Bardzo mały |
|
Elastyczność |
Umiarkowane |
Wysoka |
Ograniczona |
|
Czas
Wymaganie |
Wysoka |
Umiarkowane |
Wysoka |
|
Zastosowanie
Poziom |
Poziom procesu |
Poziom rośliny |
Poziom produktu |
|
Przykład |
Temperatura
kontrola |
Fabryka
linia produkcyjna |
Inteligentny zegarek |
|
Integracja |
Część
automatyzacja |
Zawiera
systemy sterowania |
Obsługuje oba |
Wniosek
Systemy sterowania utrzymują stabilność, stale porównując rzeczywistą moc wyjściową z wartością docelową i korygując wszelkie błędy.Ich wydajność zależy od kluczowych elementów, takich jak sprzężenie zwrotne, działanie sterownika i kontrolowany proces.Różne klasyfikacje definiują sposób obsługi sygnałów i dokładność reakcji systemu na zakłócenia.Dzięki tym możliwościom systemy sterowania znajdują szerokie zastosowanie w przemyśle, transporcie, energetyce, urządzeniach medycznych i sprzęcie codziennego użytku.
O nas
ALLELCO LIMITED
Czytaj więcej
Szybkie zapytanie.
Proszę wysłać zapytanie, natychmiast odpowiemy.
Często Zadawane Pytania [FAQ]
1. Jaka jest różnica pomiędzy sterownikiem a systemem sterowania?
Sterownik jest jedynie urządzeniem decyzyjnym (jak sterownik PLC lub PID).System sterowania obejmuje sterownik oraz czujniki, siłowniki i regulowany proces.
2. Co to jest regulacja PID i dlaczego jest ważna?
Sterowanie PID wykorzystuje działania proporcjonalne, całkujące i różniczkujące, aby szybko i płynnie minimalizować błędy.Poprawia stabilność, dokładność i szybkość reakcji w większości systemów przemysłowych.
3. Dlaczego systemy sterowania czasami oscylują lub zmieniają się?
Oscylacje występują, gdy korekty są zbyt agresywne lub opóźnione.Złe strojenie, wolne czujniki lub nadmierne wzmocnienie powodują wielokrotne przeregulowanie sygnału wyjściowego.
4. Co to jest nasycenie siłownika?
Nasycenie siłownika ma miejsce, gdy siłownik osiąga swój fizyczny limit i nie może dalej zwiększać mocy.Zapobiega to poprawianiu przez system dużych błędów.
5. Jak systemy sterowania radzą sobie z opóźnieniami w procesach?
Używają metod dostrajania, filtrów lub algorytmów predykcyjnych, aby kompensować opóźnienia, dzięki czemu korekta następuje we właściwym czasie.

Przewodnik po rezystorach 4,7 kΩ: kod kolorów, zastosowania, testowanie i porównanie wartości
na 2026/02/16

Miniaturowy wyłącznik automatyczny (MCB): zasada działania, typy, wartości znamionowe i przewodnik doboru
na 2026/02/15
Popularne posty
-

Złożone komputery zestawu instrukcji: Jak zmieniły obliczenia?
na 8000/04/18 147757
-

Pinout i funkcje USB-C
na 2000/04/18 111931
-
Korzystanie z prymitywnych symulacji XILINX: kompleksowy przewodnik po projekcie i symulacji FPGA
na 1600/04/18 111349
-

Napięcia zasilania w elektronice: znaczenie VCC, VDD, VEE, VSS i GND
na 0400/04/18 83719
-

RJ45 Podręcznik złącza: pinout, okablowanie, typy kablowe i zastosowania
na 1970/01/1 79508
-

Ostateczny przewodnik po kodach kolorów drutu w nowoczesnych systemach elektrycznych
Sposób, w jaki nasze systemy elektryczne używają kolorów, nie jest tylko dla wyglądu.Każdy kolor drutu wskazuje teraz określoną funkcję, ułatwiając poprawną identyfikację komponentów elektrycznych ...na 1970/01/1 66894
-

Jakość (Q) Współczynnik: Równania i zastosowania
Współczynnik jakości lub „Q” jest ważny podczas sprawdzania, jak dobrze induktory i rezonatory działają w systemach elektronicznych, które wykorzystują częstotliwości radiowe (RF).„Q” mierzy, jak d...na 1970/01/1 63010
-

Przewodnik zaworu oczyszczania: funkcja, objawy, testowanie i wymiana w celu optymalnej wydajności silnika
Zawór czyszczenia jest kluczową częścią systemu samochodu, który pomaga utrzymać w czystości powietrza poprzez zarządzanie oparami paliwowymi, zanim będą mogły uciec do atmosfery.To nie tylko pomag...na 1970/01/1 62994
-

Osiągnięcie wydajności szczytowej przy maksymalnym twierdzeniu o przeniesieniu mocy
Twierdzenie o maksymalnym przeniesieniu mocy wyjaśnia, w jaki sposób energia ze źródła, takiego jak akumulator lub generator, płynie do podłączonego obciążenia.Pokazuje dokładny warunek, w którym o...na 1970/01/1 54081
-

A23 Specyfikacje i kompatybilność baterii
Akumulator A23 to mała akumulator w kształcie cylindra o wysokim napięciu.Nazywany również 23a, 23E lub Mn21, działa przy 12 woltach i znacznie wyższy niż akumulatory AA lub AAA.Jego specj...na 1970/01/1 52111
Gorący numer części
-

C8051T606-ZMR
Silicon Labs
IC MCU 8BIT 1.5KB OTP 10QFN
MCF51AC256BCLKE
NXP USA Inc.
IC MCU 32BIT 256KB FLASH 80LQFP
R5F101LCAFB#30
Renesas Electronics America Inc
IC MCU 16BIT 32KB FLASH 64LQFP
TSC102IPT
STMicroelectronics
IC CURR SENSE 1 CIRCUIT 8TSSOP
AD8004ARZ-14-REEL7
Analog Devices Inc.
IC OPAMP CFA 4 CIRCUIT 14SOIC
170M2109
Eaton - Bussmann Electrical Division
FUSE SQUARE 160A 1.2KV RECT
CSTLS8M00G56-B0
Murata Electronics
CERAMIC RES 8.0000MHZ 47PF T/H
PIC18F23K22-I/SP
Microchip Technology
IC MCU 8BIT 8KB FLASH 28SPDIP
MIC5301-3.0YD5
Micrel Inc.
IC REG LINEAR 3V 150MA TSOT23-5
SPMWHT541ML5XAWMS5
Samsung Semiconductor, Inc.
LED LM561C WARM WHT 2700K 4SMD
DAC7551TDRNRQ1
Texas Instruments
IC DAC 12BIT V-OUT 12USON
WP7113GD
Kingbright
LED GREEN DIFFUSED T-1 3/4 T/H
XC7V585T-2FFG1761I
AMD
IC FPGA 850 I/O 1761FCBGA
LQW15AN51NJ00D
Murata Electronics
FIXED IND 51NH 210MA 1.08OHM SMD
NZL5V6ATT1
onsemi
TVS DIODE 3VWM 9.97V SC75 SOT416
MC100EPT20DT
onsemi
IC XLATOR TTL/CMOS-PECL 8TSSOP
C1608C0G1H080C080AA
TDK Corporation
CAP CER 8PF 50V C0G 0603
AD8674ARUZ
Analog Devices Inc.
IC OPAMP GP 4 CIRCUIT 14TSSOP -

LT6703IDC-2#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR 3DFN
AD5755ACPZ
Analog Devices Inc.
IC DAC 16BIT V/A-OUT 64LFCSP
EPM7160SQC160-6
Intel
IC CPLD 160MC 6NS 160QFP
MAX158BEWI+
Analog Devices Inc./Maxim Integrated
IC ADC 8BIT 8CH W/MUX&REF 28SOIC
SA605D/01
NXP USA Inc.
AUDIO SINGLE CHIP RECEIVER
SLG7NT4229V
Renesas Design Germany GmbH
CMIC, PWROK GENERATOR AND STARTU
170M4410
Eaton - Bussmann Electrical Division
FUSE SQUARE 315A 700VAC RECT
STTH5L06FP
STMicroelectronics
DIODE GEN PURP 600V 5A TO220FPAC
1812SC103KAT1A\SB
KYOCERA AVX
CAP CER 10000PF 1.5KV X7R 1812
HEDS-9710#R50
Broadcom Limited
ROTARY ENCODR OPTICAL 200 LPI
MAX825ZEXK
Analog Devices Inc./Maxim Integrated
IC SUPERVISOR MPU
T491C106K025AT7280
KEMET
CAP TANT 10UF 10% 25V 2312
LT1719IS6#TRPBF
Analog Devices Inc.
IC COMPARATOR 1 GEN PUR TSOT23-6
VI-J54-CX
Vicor Corporation
DC DC CONVERTER 48V 75W
TPS73433TDDCRQ1
Texas Instruments
IC REG LINEAR 3.3V 250MA SOT23-5
ICL7107SCPL
Renesas Electronics America Inc
IC DISPLAY DRIVER 3.5DIGIT 40DIP
H11D2SD
onsemi
OPTOISO 5.3KV TRANS W/BASE 6SMD
ZVP2120GTA
Diodes Incorporated
MOSFET P-CH 200V 200MA SOT223 -

MAX3378EEBC+T
Analog Devices Inc./Maxim Integrated
IC TRANSLTR BIDIRECTIONAL 12UCSP
VI-812076B
Vicor Corporation
M 18/36/24 48V/ 4.17A
DAC43701DSGR
Texas Instruments
IC DAC 8BIT V-OUT 8WSON
S-80846CNUA-B87T2G
ABLIC Inc.
IC SUPERVISOR 1 CHANNEL SOT89-3
0402ZC471JAT2A
KYOCERA AVX
CAP CER 470PF 10V X7R 0402
TPS22976NDPUR
Texas Instruments
IC PWR SWITCH N-CHAN 1:1 14WSON
MTFDDAV256TBN-1AR1ZABYY
Micron Technology Inc.
SSD 256GB M.2 TLC SATA III 3.3V
FDC8886
onsemi
MOSFET N-CH 30V 6.5/8A SUPERSOT6
1812AC222JAT1A
KYOCERA AVX
CAP CER 2200PF 1KV X7R 1812
M4T32-BR12SH6
STMicroelectronics
SNAPHAT BATT/CRYSTAL FOR SOIC
SIHG47N60AEF-GE3
Vishay Siliconix
MOSFET N-CH 600V 40A TO247AC
SR295E104MARTR1
KYOCERA AVX
CAP CER 0.1UF 50V Z5U RADIAL
P6KE56CA
Littelfuse Inc.
TVS DIODE 47.8VWM 77VC DO204AC
ADP2102YCPZ-1.2-R7
Analog Devices Inc.
IC REG BUCK 1.2V 600MA 8LFCSP
IRFZ34NSTRLPBF
Infineon Technologies
MOSFET N-CH 55V 29A D2PAK
MAX5105EEP+T
Analog Devices Inc./Maxim Integrated
IC DAC 8BIT V-OUT 20QSOP
ST72F623F2M1
STMicroelectronics
IC MCU 8BIT 8KB FLASH 20SOIC
XRT91L80IB-F
MaxLinear, Inc.
IC TRANSCEIVER FULL 196STBGA